5.1 Γενικές έννοιες
Ο μηχανισμός, ο οποίος περιλαμβάνει έναν περιστρεφόμενο σύνδεσμο με επιφάνεια εργασίας μεταβλητής καμπυλότητας, ονομάζεται έκκεντροκαι ο σύνδεσμος εξόδου με τη μορφή ενός ωθητή (ταλαντωτή), που σχηματίζει ένα υψηλότερο κινηματικό ζεύγος, ονομάζεται έκκεντρο.
Ταξινόμηση μηχανισμών επίπεδων έκκεντρων και οι κύριες παράμετροι του έκκεντρου.
Οι μηχανισμοί επίπεδου έκκεντρου (Εικ. 5.1) με περιστρεφόμενο έκκεντρο χωρίζονται σε δύο ομάδες: η 1η ομάδα μετατρέπει την περιστροφική κίνηση του έκκεντρου σε μεταφορική κίνηση του ωθητή. 2η ομάδα - η περιστροφική κίνηση του έκκεντρου στην ταλαντευτική κίνηση του ταλαντωτή.
Κάθε μία από αυτές τις ομάδες, ανάλογα με το σχήμα του στοιχείου του οδηγούμενου συνδέσμου, χωρίζεται σε τρεις ακόμη υποομάδες στις οποίες λειτουργεί το έκκεντρο: α) κατά μήκος της άκρης. β) με βίντεο. γ) επίπεδο. Οι μηχανισμοί έκκεντρου που μετατρέπουν την περιστροφική κίνηση σε μεταφορική, στην οποία το έκκεντρο λειτουργεί κατά μήκος ενός άκρου ή κατά μήκος ενός κυλίνδρου, χωρίζονται με τη σειρά τους σε κεντρικούς και απαξονικούς. Κεντρικόςονομάζονται εκείνα στα οποία ο άξονας του ωστήρα διέρχεται από το κέντρο περιστροφής του έκκεντρου. ΣΕ απαξονικόςστους ίδιους μηχανισμούς, ο άξονας του ωστήρα μετατοπίζεται σε σχέση με το κέντρο περιστροφής του έκκεντρου κατά ένα ορισμένο ποσό μιπου ονομάζεται αποαξονικός. Υπάρχουν οκτώ βασικές ρυθμίσεις έκκεντρου.
Προφίλέκκεντρο ονομάζεται μια καμπύλη που προκύπτει στην τομή του εκκεντροφόρου στοιχείου από ένα επίπεδο κάθετο στον άξονα περιστροφής του. Παρά τη μεγάλη ποικιλία προφίλ έκκεντρων, όλα έχουν κάποιες κοινές παραμέτρους.
Στο σχ. Το 5.2 δείχνει ένα έκκεντρο του οποίου το προφίλ τραβιέται από τέσσερα τόξα κύκλων.

Τόξο αβτραβηγμένο από το κέντρο Ο 1, τόξο προ ΧΡΙΣΤΟΥ- από το κέντρο του Ο 2, τόξο CD- από το κέντρο Ο 1, τόξο δα- από το κέντρο O 2 / . Οι κύριες διαστάσεις του έκκεντρου περιλαμβάνουν τα ακόλουθα.
Ελάχιστη ακτίνα γνάθου R 0- ακτίνα που συνδέει το κέντρο περιστροφής του έκκεντρου με το πλησιέστερο σημείο του προφίλ έκκεντρου.
Μέγιστη ακτίνα γνάθου R maxείναι η ακτίνα που συνδέει το κέντρο του έκκεντρου με το εξώτατο σημείο του προφίλ έκκεντρου.
Ανελκυστήρας ώθησης h- τη διαφορά μεταξύ των μηκών της μέγιστης και της ελάχιστης ακτίνας έκκεντρου.
Γωνία έκκεντρου που δεν λειτουργεί (φάση μη λειτουργίας) φ 0- η κεντρική γωνία με βάση το τόξο αβελάχιστη ακτίνα. Κατά την ολίσθηση κατά μήκος ενός τόξου ελάχιστης ακτίνας, ο προωθητής είναι ακίνητος και βρίσκεται στην κάτω θέση.
Γωνία αφαίρεσης (φάση αφαίρεσης) φ Υ προ ΧΡΙΣΤΟΥ, συνδέοντας τα ακραία σημεία των τόξων της ελάχιστης και της μέγιστης έκκεντρης ακτίνας. Όταν γλιστράτε κατά μήκος ενός τόξου προ ΧΡΙΣΤΟΥη ώθηση έρχεται σε κίνηση και απομακρύνεται στη μέγιστη απόσταση (περνάει από την κάτω στην πάνω θέση).
Γωνία μακρινής στάσης (μακριά όρθια φάση) φ d- η κεντρική γωνία του έκκεντρου, με βάση το τόξο CDμέγιστη ακτίνα. Ενώ η ώθηση ολισθαίνει σε ένα τόξο CD, είναι ακίνητο και βρίσκεται στη μέγιστη απόσταση από το κέντρο περιστροφής του έκκεντρου.
Γωνία επιστροφής (φάση επιστροφής) φ B- η κεντρική γωνία του έκκεντρου, με βάση το τόξο δα, συνδέοντας τα ακραία σημεία των τόξων της μέγιστης και της ελάχιστης έκκεντρης ακτίνας. Όταν γλιστράτε κατά μήκος ενός τόξου δαο ωθητής επιστρέφει από το μακρινό στην αρχική του (χαμηλότερη) θέση.
Γωνία εργασίας έκκεντρου (φάση εργασίας) φ P- η κεντρική γωνία του έκκεντρου, ίση με το άθροισμα των γωνιών αφαίρεσης, απόστασης και επιστροφής ![]() .
.
Το άθροισμα όλων των γωνιών πρέπει να είναι ίσο με 360 0:
Οι ακτίνες του προφίλ έκκεντρου R 2 (R 2 /) είναι οι ακτίνες των τόξων που αντιστοιχούν στις φάσεις αφαίρεσης και επιστροφής, αντίστοιχα. Εάν η καμπύλη που αντιστοιχεί στη φάση αφαίρεσης (ή επιστροφής) δεν είναι τόξο κύκλου, τότε η ακτίνα του προφίλ έκκεντρου σε αυτή την περίπτωση θα είναι μεταβλητή.
5.2 Ανάλυση και σύνθεση μηχανισμών έκκεντρου
Το καθήκον της κινηματικής ανάλυσης είναι να προσδιορίσει το νόμο της κίνησης, την ταχύτητα και την επιτάχυνση του ωστήρα (ταλαντωτή) σύμφωνα με το γνωστό κινηματικό σχήμα του μηχανισμού και τη συχνότητα περιστροφής του έκκεντρου.
Ο προσδιορισμός των ταχυτήτων και των επιταχύνσεων του ωθητή (ταλαντωτή) βρίσκεται με γραφική διαφοροποίηση του νόμου της κίνησης του συνδέσμου εξόδου.
Για να αναλύσετε μηχανισμούς έκκεντρου με αυθαίρετο προφίλ έκκεντρου, μέθοδος αντίστροφης κίνησης, στο οποίο το έκκεντρο θεωρείται ακίνητο και στο ράφι, μαζί με τον ωστήρα (ταλαντωτή), δίνεται μια περιστροφική κίνηση γύρω από τον άξονα του έκκεντρου με τη γωνιακή ταχύτητα του έκκεντρου, αλλά προς την αντίθετη κατεύθυνση. Σε μια τέτοια κίνηση, η κίνηση του ωστήρα (ταλαντωτή) σε σχέση με το έκκεντρο θα είναι η ίδια όπως στην πραγματική κίνηση με ένα σταθερό ράφι.
Κατά τη σύνθεση, το προφίλ του έκκεντρου βρίσκεται σύμφωνα με το γνωστό δομικό σχήμα, τις κύριες διαστάσεις του έκκεντρου και τον νόμο της κίνησης του ωθητή (ταλαντωτή).
5.2.1 Μηχανισμός κεντρικού έκκεντρου στον οποίο το έκκεντρο λειτουργεί σε ωστήρα με αιχμή
Ανάλυση μηχανισμού.
Γνωστά: οι παράμετροι του κινηματικού σχήματος του μηχανισμού και η συχνότητα περιστροφής του έκκεντρου (min -1).
Για να βρεθεί η κίνηση του ωθητή, κατασκευάζεται ένα κινηματικό διάγραμμα του μηχανισμού (Εικ. 5.3, α), για παράδειγμα, σε μια κλίμακα
όπου είναι η ακτίνα του ελάχιστου κύκλου έκκεντρου μέσα Μ;
Η ακτίνα του κύκλου στο σχέδιο μέσα mm.

Στον κύκλο ακτίνας, απεικονίζεται η γωνία εργασίας (για παράδειγμα), η οποία βρίσκεται από την έκφραση
όπου , - αντίστοιχα, ο χρόνος μιας περιστροφής και ο χρόνος εργασίας στο s.
Πλήρης χρόνος περιστροφής κάμερας
Η γωνία εργασίας χωρίζεται σε ίσα μέρη (στην Εικ. 5.3 - 18) και οι ακτίνες τραβιέται μέσα από το κέντρο O 1 και τα σημεία 1-18 μέχρι να συναντήσουν το προφίλ έκκεντρου. Οι αποστάσεις 1-1 / , 2-2 / , ... από τον κύκλο της ελάχιστης ακτίνας έως το προφίλ του έκκεντρου είναι οι μετατοπίσεις του ωθητή που αντιστοιχούν στην περιστροφή του έκκεντρου κατά μια γωνία που καθορίζεται από τον αριθμό διαίρεσης.
Για να δημιουργηθεί μια γραφική εξάρτηση στο σύστημα συντεταγμένων, οι κλίμακες της μετατόπισης του ωθητή και του χρόνου επιλέγονται στο σύστημα συντεταγμένων
; m/mm (5,4)
S/mm (5,5)
όπου είναι η τεταγμένη σε mm που αντιστοιχεί στην κίνηση του ωθητή στη θέση -η μέσα Μ;
Η τετμημένη σε mm, που αντιστοιχεί στο χρόνο περιστροφής του έκκεντρου στη γωνία εργασίας in Με.
Στην περίπτωση που , οι κλίμακες του κινηματικού σχήματος και του γραφήματος είναι ίδιες. Ο άξονας της τετμημένης χωρίζεται σε ίσα μέρη (στην περίπτωση αυτή, 18) και τα τμήματα 1-1 //, 2-2 //, ..., 18-18 // σχεδιάζονται μέσω των σημείων διαίρεσης, εκφράζοντας τις αντίστοιχες μετατοπίσεις του ο ωστήρας στην κατάλληλη κλίμακα (Εικ. 5.3β).
Σύνθεση του μηχανισμού.
Γνωστά: το μπλοκ διάγραμμα του μηχανισμού, το κύριο μέγεθος R 0 και η συχνότητα περιστροφής του έκκεντρου, ο νόμος της κίνησης του ωστήρα, που δίνεται από ένα από τα κινηματικά γραφήματα (Εικ. 5.4, α).
Πρέπει να δημιουργήσετε ένα προφίλ κάμερας.
Έστω, όπως στην περίπτωση της ανάλυσης, και ο νόμος της κίνησης αντιπροσωπεύεται από ένα γράφημα.
 α) β)
α) β)
Για να λυθεί το πρόβλημα σε κλίμακα (5.1), σχεδιάζεται ένας κύκλος ακτίνας R 0 του έκκεντρου και σχεδιάζεται πάνω του η γωνία εργασίας, η οποία χωρίζεται σε n ίσα μέρη. Οι ακτίνες διέρχονται από τα σημεία διαίρεσης και το κέντρο του κύκλου. Η τετμημένη του γραφήματος χωρίζεται στον ίδιο n αριθμό τμημάτων και οι αντίστοιχες τιμές βρίσκονται στις τεταγμένες, οι οποίες σε μια κλίμακα εκφράζουν τις αντίστοιχες θέσεις του άκρου ώθησης στο προφίλ έκκεντρου. Επομένως, εάν αφήσουμε στην άκρη τμήματα από τον κύκλο στις ακτίνες, λαμβάνοντας υπόψη την κλίμακα, και συνδέσουμε αυτά τα σημεία με μια ομαλή γραμμή, θα λάβουμε ένα προφίλ έκκεντρου που παρέχει τον απαιτούμενο τρόπο κίνησης (Εικ. 5.4, β).
5.2.2 Μηχανισμός αποαξονικού έκκεντρου, στον οποίο το έκκεντρο λειτουργεί σε μοχλό με μύτη
Κινηματική ανάλυση του μηχανισμού.
Αφήστε το κινηματικό σχήμα του μηχανισμού (Εικ. 5.5) να δοθεί στην κλίμακα (5.1). Σχεδιάζουμε έναν κύκλο ελάχιστης ακτίνας και έναν κύκλο απαξονικής (η ακτίνα του οποίου είναι ίση με την απαξονική). Εάν, αντί για έκκεντρο, περιστραφεί ένας κύκλος ελάχιστης ακτίνας (γύρω από το ίδιο κέντρο O 1), τότε η ώθηση θα ήταν ακίνητη και η άκρη του θα βρισκόταν συνεχώς στο σημείο 6 / (και θα γλιστρούσε κατά μήκος του κύκλου της ελάχιστης ακτίνας ). Στην πραγματικότητα, το έκκεντρο περιστρέφεται επίσης στη θέση που φαίνεται στο Σχ. 5.5, ΕΝΑ, η άκρη του ωστήρα βρίσκεται στο σημείο 6 // ; Επομένως, το τμήμα 6 / -6 // της εφαπτομένης στον απαξονικό κύκλο, που περικλείεται μεταξύ του κύκλου της ελάχιστης ακτίνας και του προφίλ του έκκεντρου, είναι η άνοδος του ωθητή σε αυτή τη θέση. Για να βρείτε τις ανυψώσεις του ωθητή σε άλλες θέσεις, είναι απαραίτητο να σπάσετε τον απαξονικό κύκλο σε μέρη, να τραβήξετε εφαπτόμενες στα σημεία διαίρεσης και να μετρήσετε τα αντίστοιχα τμήματα αυτών των εφαπτομένων. Συνήθως όμως η διαίρεση δεν ξεκινά από ένα αυθαίρετο σημείο, αλλά από το σημείο στο οποίο ξεκινά η ανύψωση του ωθητή. Στο σχ. 5.5, ΕΝΑμπορεί να φανεί ότι ένα τέτοιο σημείο στο προφίλ έκκεντρου είναι το σημείο O / (στο οποίο το προφίλ έκκεντρου διαχωρίζεται από τον κύκλο της ελάχιστης ακτίνας). Πρέπει να βρούμε το αντίστοιχο σημείο στην περιφέρεια του απαξονικού. Για να γίνει αυτό, σχεδιάζουμε μια εφαπτομένη στον κύκλο του απαξονικού μέσω του σημείου O /. Το σημείο επαφής O θα είναι το επιθυμητό σημείο. Από το σημείο Ο στην περιφέρεια της απαξονικής, παραμερίζουμε τη γωνία εργασίας (5.2) και τη χωρίζουμε σε πολλά ίσα μέρη (στο Σχ. 5.5, ΕΝΑη γωνία εργασίας χωρίζεται σε 8 μέρη). Μέσα από τα σημεία διαίρεσης σχεδιάζουμε εφαπτόμενες στον κύκλο του απαξονικού. Τα τμήματα των εφαπτομένων μεταξύ του κύκλου ελάχιστης ακτίνας και του προφίλ του έκκεντρου θα είναι η επιθυμητή μετατόπιση του ωθητή (Εικ. 5.5, β).
Θα ήταν δυνατό να δημιουργηθούν γραφήματα για αυτές τις μετατοπίσεις χρησιμοποιώντας τις εκφράσεις (5.4) και (5.5).

Αλλά, όπως μπορείτε να δείτε, ούτε μία εφαπτομένη δεν πέρασε από το δάκτυλο του έκκεντρου (σημείο), επομένως, το γράφημα δεν θα έχει τη μέγιστη ανύψωση του ωθητή. Για να διορθώσετε αυτήν την κατάσταση, σχεδιάστε μια εφαπτομένη στον απαξονικό κύκλο μέσω του δακτύλου του έκκεντρου και σημειώστε το σημείο επαφής.
Αναβάλλοντας τις κινήσεις που βρέθηκαν του ωθητή σε μια κλίμακα (5.4) από τον άξονα της τετμημένης (Εικ. 5.5, β), παίρνουμε ένα γράφημα.
Παρά το γεγονός ότι το έκκεντρο ήταν συμμετρικό, το γράφημα αποδείχθηκε ασύμμετρο (η ασυμμετρία του γραφήματος μπορεί να κριθεί τουλάχιστον από το γεγονός ότι η μέγιστη ανύψωση του ωθητή δεν ήταν στη μέση του γραφήματος). Αυτή η ιδιότητα των μηχανισμών απαξονικού έκκεντρου χρησιμοποιείται στην πράξη όταν θέλουν να αποκτήσουν ένα συμμετρικό έκκεντρο με ασύμμετρο χρονοδιάγραμμα.
Σύνθεση του μηχανισμού.
Ας δοθεί τώρα το γράφημα (Εικ. 5.5, β) και οι κύριες διαστάσεις του έκκεντρου (ελάχιστη ακτίνα του έκκεντρου, απαξονική και γωνία εργασίας του έκκεντρου). Απαιτείται η κατασκευή ενός προφίλ κάμερας.
Διαιρούμε το δεδομένο γράφημα με τεταγμένες σε πολλά ίσα τμήματα (στο Σχ. 5.5, σιΤο γράφημα χωρίζεται σε οκτώ ενότητες). Εάν καμία από τις τεταγμένες δεν πέρασε από το σημείο που αντιστοιχεί στη μέγιστη ανύψωση του ωθητή, τότε σχεδιάζουμε μια πρόσθετη τεταγμένη από αυτό το σημείο.
Επιλέγουμε την κλίμακα (5.1), στην οποία θα πρέπει να σχεδιαστεί το κινηματικό διάγραμμα του μηχανισμού, και από ένα κέντρο O 1 (Εικ. 5.5, α) σχεδιάζουμε δύο κύκλους: την ελάχιστη ακτίνα και την απαξονική. Στον κύκλο του απαξονικού από ένα αυθαίρετο σημείο Ο, παραμερίζουμε τη γωνία εργασίας (5.2) και τη χωρίζουμε σε όσα ίσα μέρη χωρίζεται η γραφική παράσταση. Μέσω των σημείων διαίρεσης 0, 1, 2 κ.λπ. σχεδιάζουμε εφαπτομένες στον κύκλο του απαξονικού. Σε αυτές τις εφαπτομένες από τον κύκλο της ελάχιστης ακτίνας, αναβάλλουμε τις μετατοπίσεις του ωθητή, που λαμβάνονται από το γράφημα. Εάν οι κλίμακες μήκους στο γράφημα και στο κινηματικό διάγραμμα είναι διαφορετικές, τότε, χρησιμοποιώντας τις εξαρτήσεις (5.1) και (5.4), τις λαμβάνουμε στην απαιτούμενη κλίμακα. Συνδέοντας τα άκρα των αναβαλλόμενων κινήσεων με μια ομαλή καμπύλη, λαμβάνουμε το επιθυμητό προφίλ έκκεντρου (Εικ. 5.5, α). Από τον άξονα περιστροφής περίπου 1 έκκεντρο σε απόσταση απαξονικής, σχεδιάζουμε ένα ωστήριο. Έτσι, το απαιτούμενο κινηματικό διάγραμμα του μηχανισμού έκκεντρου είναι έτοιμο.
5.2.3 Μηχανισμός κεντρικού έκκεντρου στον οποίο το έκκεντρο κινείται σε ρολό
Ανάλυση μηχανισμού.
Ας δοθεί το κινηματικό σχήμα του κεντρικού έκκεντρου μηχανισμού (Εικ. 5.6, α). Απαιτείται η πραγματοποίηση κινηματικής ανάλυσης, δηλαδή η κατασκευή γραφήματος.
Η τροχιά του κέντρου του κυλίνδρου (σημείο Β) όταν κινείται σε σχέση με το έκκεντρο (σε αντίστροφη κίνηση) ονομάζεται κεντρικό προφίλέκκεντρο. Εφόσον το κέντρο του κυλίνδρου Β βρίσκεται πάντα στην ίδια απόσταση από το πραγματικό προφίλ έκκεντρου, ίση με την ακτίνα του κυλίνδρου, τότε το κεντρικό και το πραγματικό προφίλ έκκεντρου θα είναι αυτός που απέχει εξίσου(ισοδύναμες) καμπύλες.
 |
Κατασκευή ισαπέχουσας καμπύλης μισε αυτή την καμπύλη ΠΡΟΣ ΤΗΝφαίνεται στο σχ. 5.6, γ. Έστω να απαιτείται για τη δεδομένη καμπύλη ΠΡΟΣ ΤΗΝχτίστε μια καμπύλη σε ίση απόσταση μισε απόσταση ίση με . Για αυτό, στην καμπύλη ΠΡΟΣ ΤΗΝεπιλέξτε μια σειρά σημείων (σε απόσταση 3-5 mm το ένα από το άλλο) και σχεδιάστε τόξα από αυτά τα σημεία με ακτίνα ίση με . Ο φάκελος αυτών των τόξων μικαι θα είναι η επιθυμητή ισαπέχουσα καμπύλη. Σε μια συγκεκριμένη περίπτωση, για έναν κύκλο, μια ισαπέχουσα καμπύλη θα είναι ένας κύκλος ομόκεντρος προς τον δεδομένο.
Στο διάγραμμα μηχανισμού (Εικ. 5.6, α), θα κατασκευάσουμε το κεντρικό προφίλ του έκκεντρου (η κατασκευή του φαίνεται στο τμήμα του κεντρικού προφίλ σύμφωνα με τη μέθοδο που περιγράφεται παραπάνω).
Το κεντρικό προφίλ έχει τη δική του (αυξημένη) ελάχιστη ακτίνα. Ας το συμβολίσουμε με, λοιπόν
πού είναι η ελάχιστη ακτίνα του έκκεντρου;
Διάμετρος κυλίνδρου.
Τώρα ας αντικαταστήσουμε το πραγματικό έκκεντρο, που εργάζεται σε έναν κύλινδρο, με ένα κεντρικό έκκεντρο, δουλεύοντας σε έναν ωστήρα με άκρη (στο Σχ. 5.6, ΕΝΑαυτή η ώθηση φαίνεται με μια διακεκομμένη γραμμή). Η κινηματική ανάλυση ενός τέτοιου σχήματος περιγράφεται παραπάνω.
Σύνθεση του μηχανισμού.
Η σύνθεση πραγματοποιείται με την αντίστροφη σειρά της ανάλυσης. Ας δοθεί η γραφική παράσταση (Εικ. 5.6, β) και οι κύριες διαστάσεις του έκκεντρου. Απαιτείται η κατασκευή ενός προφίλ κάμερας. Αρχικά, κατασκευάζουμε το κεντρικό προφίλ του έκκεντρου που λειτουργεί κατά μήκος της άκρης (κατά την κατασκευή του κεντρικού προφίλ, η ελάχιστη ακτίνα θεωρείται ότι είναι ).
Στη συνέχεια περνάμε από το κεντρικό προφίλ στο πραγματικό κατασκευάζοντας μια ισαπέχουσα καμπύλη «μέσα». Στη θέση του πραγματικού προφίλ (Εικ. 5.6, α) φαίνεται η κατασκευή του (ως ισαπέχουσα καμπύλη).
5.2.4 Μηχανισμός απαξονικού έκκεντρου, στον οποίο το έκκεντρο κινεί τον ωστήρα με έναν κύλινδρο
Ανάλυση μηχανισμού.
Ας δοθεί το κινηματικό σχήμα ενός μηχανισμού απαξονικού έκκεντρου με ρολό (Εικ. 5.7). Απαιτείται κινηματική ανάλυση.
Αντικαθιστούμε το πραγματικό έκκεντρο (που δουλεύει κατά μήκος του κυλίνδρου) με ένα κεντρικό προφίλ που λειτουργεί κατά μήκος ενός ωστηρίου με άκρη (η κατασκευή του φαίνεται στο τμήμα του κεντρικού προφίλ ως καμπύλη σε ίση απόσταση από το πραγματικό προφίλ έκκεντρου). Στη συνέχεια, πραγματοποιείται κινηματική ανάλυση του κεντρικού προφίλ του έκκεντρου, δουλεύοντας σε ωστήρα με άκρη.
 |
Σύνθεση του μηχανισμού.
Η σύνθεση πραγματοποιείται με την αντίστροφη σειρά της ανάλυσης. Αρχικά, σύμφωνα με ένα δεδομένο χρονοδιάγραμμα, βρίσκεται το κεντρικό προφίλ του έκκεντρου (κατά την κατασκευή του κεντρικού προφίλ, η ελάχιστη ακτίνα του έκκεντρου αυξάνεται κατά την τιμή της ακτίνας του κυλίνδρου).
Στη συνέχεια μετακινούνται από το κεντρικό προφίλ στο πραγματικό κατασκευάζοντας μια ισαπέχουσα καμπύλη προς τα μέσα (Εικ. 5.7). Στο τμήμα του πραγματικού προφίλ φαίνεται η κατασκευή του (ως ισαπέχουσα καμπύλη).
5.2.5 Μηχανισμός έκκεντρου στον οποίο το έκκεντρο κινεί έναν επίπεδο οπαδό
Ανάλυση μηχανισμού.
Ας δοθεί το κινηματικό σχήμα του μηχανισμού έκκεντρου με επίπεδο ωστήρα (Εικ. 5.8, α). Απαιτείται η πραγματοποίηση κινηματικής ανάλυσης, δηλαδή η σχεδίαση γραφήματος
Σχεδιάζουμε έναν κύκλο ελάχιστης ακτίνας σε μια κλίμακα (5.1), σχεδιάζουμε τη γωνία εργασίας σε αυτόν τον κύκλο και τον χωρίζουμε σε 12 ίσα μέρη. Ας χρησιμοποιήσουμε τη μέθοδο της αντίστροφης κίνησης. Αφήστε τον άξονα του ωστήρα O 1 V να στραφεί κατά 30 0 στην αντίστροφη κίνηση και να πάρει την πρώτη θέση O 1 V 1. Είναι απαραίτητο να βρεθεί η θέση της πλάκας ώθησης, η οποία κατά τη λειτουργία αγγίζει συνεχώς το προφίλ του έκκεντρου και παραμένει κάθετη στον άξονα της ώθησης. Μετακινούμε την εφαπτομένη στο προφίλ του έκκεντρου, το οποίο είναι επίσης κάθετο στον άξονα O 1 B 1 του ωστήρα στην πρώτη θέση. Απόσταση 1-με 1από τον κύκλο ελάχιστης ακτίνας προς την πλάκα ώθησης και θα είναι η κίνηση του ωστήρα στην πρώτη θέση. Με τον ίδιο τρόπο βρίσκουμε τη μετατόπιση 2-s 2στη δεύτερη θέση και σε όλες τις επόμενες (κίνηση του ωστήρα στο Σχ. 5.8, ΕΝΑφαίνεται με έντονες γραμμές). Αναβάλλοντας τις μετατοπίσεις που βρέθηκαν από τον άξονα x (Εικ. 5.8, β), παίρνουμε ένα γράφημα.
 |
 |
Σύνθεση του μηχανισμού.
Η σύνθεση πραγματοποιείται με την αντίστροφη σειρά της ανάλυσης. Ας δοθεί τώρα το χρονοδιάγραμμα (Εικ. 5.8, β). Απαιτείται η κατασκευή ενός προφίλ έκκεντρου που λειτουργεί σε επίπεδο ωστήρα. Σχεδιάζουμε έναν κύκλο ελάχιστης ακτίνας (Εικ. 5.8, α). Από ένα αυθαίρετο σημείο Σχετικά με αυτόν τον κύκλο, παραμερίζουμε τη δεδομένη γωνία εργασίας και τη χωρίζουμε σε 12 ίσα μέρη. Σύμφωνα με το γράφημα, βρίσκουμε τις μετατοπίσεις του ωστήρα που αντιστοιχούν σε κάθε θέση του άξονά του στην ανεστραμμένη κίνηση (σπάζοντας το γράφημα σε τόσα ίσα μέρη σε όσα χωρίζεται η γωνία λειτουργίας του έκκεντρου). Από τον κύκλο της ελάχιστης ακτίνας στη συνέχεια των ακτίνων, αναβάλλουμε τις αντίστοιχες μετατοπίσεις που λαμβάνονται από το γράφημα, παίρνουμε σημεία από 1, από 2, από 3, ..., από 12 (αν το μήκος κλιμακώνεται στο γράφημα και το κινηματικό διάγραμμα είναι διαφορετικό, τότε πριν αναβάλετε τη μετατόπιση της ώθησης, πρέπει να χρησιμοποιήσετε τον τύπο (5.5) Μέσω των σημείων c 1, c 2, c 3, κ.λπ., σχεδιάζουμε κάθετες , , , ... στις προεκτάσεις του τις ακτίνες και έτσι βρίσκουμε 12 θέσεις της πλάκας .
Το πραγματικό προφίλ του έκκεντρου θα είναι το περίβλημα όλων των θέσεων της πλάκας ώθησης. Για να γίνει πιο ακριβές το προφίλ έκκεντρου, είναι απαραίτητο να βρείτε όσο το δυνατόν περισσότερες θέσεις της πλάκας ώθησης στην αντίστροφη κίνηση.
5.2.6 Μηχανισμός έκκεντρου στον οποίο το έκκεντρο κινεί ένα ρολό με μύτη
Ανάλυση μηχανισμού.
Ας δοθεί το κινηματικό σχήμα του μηχανισμού έκκεντρου με ταλαντωτή (Εικ. 5.9, α). Απαιτείται η πραγματοποίηση κινηματικής ανάλυσης, δηλαδή η κατασκευή γραφήματος. Το κέντρο περιστροφής του ταλαντωτή Ο σε αντίστροφη κίνηση θα κινείται κατά μήκος ενός κύκλου ακτίνας O 1 O (Εικ. 5.9, α).
Σε αυτόν τον κύκλο, από το σημείο Ο, παραμερίζουμε προς την αντίθετη από τη γωνιακή ταχύτητα του έκκεντρου, τη γωνία εργασίας του έκκεντρου και τον χωρίζουμε σε 12 ίσα μέρη. Στο σχ. 5.9, ΕΝΑΟ ταλαντωτής RH εμφανίζεται στην κάτω θέση (στην αρχή της ανόδου). Εάν στο κινηματικό διάγραμμα ο ταλαντωτής δεν εμφανίζεται στην κάτω θέση, αλλά σε μια ενδιάμεση θέση, τότε πρέπει πρώτα να βρείτε τη θέση του κέντρου περιστροφής του ταλαντωτή που αντιστοιχεί στην αρχή της ανόδου στην αντίστροφη κίνηση (στο έναν κύκλο ακτίνας O 1 O), και από αυτό το σημείο παραμερίστε τη γωνία εργασίας. Στην αντίστροφη κίνηση, το κέντρο περιστροφής O του ταλαντωτή σε κύκλο ακτίνας O 1 O καταλαμβάνει διαδοχικές θέσεις 1, 2, 3, ..., 12 (που αντιστοιχούν στην περιστροφή του έκκεντρου κατά την ίδια γωνία). Το δεύτερο άκρο του ταλαντωτή (σημείο Β) ολισθαίνει κατά μήκος του προφίλ του έκκεντρου. Βρίσκουμε τις διαδοχικές θέσεις του σημείου Β. Για να γίνει αυτό, με το μήκος του ταλαντωτή OB από τα σημεία 1, 2, 3, ..., 12 (κύκλοι ακτίνας O 1 O), κάνουμε εγκοπές στο προφίλ έκκεντρου, παίρνουμε τους βαθμούς 1 / , 2 / , 3 / , ..., 12 / .
Στην πραγματική κίνηση, το άκρο του ταλαντωτή Β θα κινείται κατά μήκος ενός τόξου που περιγράφεται από την ακτίνα OB από το κέντρο Ο. Για να βρούμε τις αντίστοιχες θέσεις του σημείου Β σε αληθινή κίνηση, είναι απαραίτητο να κάνουμε εγκοπές στο τόξο από το κέντρο του περιστροφή O 1 του έκκεντρου με αποστάσεις O 1 1 / , O 1 2 / , О 1 3 / , …, О 1 12 / , παίρνουμε σημεία 1 // , 2 // , 3 // , …, 12 // . Κατά την κατασκευή ενός γραφήματος, αντί για τις γωνίες περιστροφής του ταλαντωτή, μπορείτε να σχεδιάσετε τα μήκη των τόξων B-1 //, B-2 //, κ.λπ., μετρημένα απευθείας κατά μήκος του τόξου. Ο συντελεστής κλιμάκωσης της γωνίας περιστροφής του ταλαντωτή σε αυτή την περίπτωση
 ,rad/mm, (5,7)
,rad/mm, (5,7)
πού είναι η γωνία ταλάντωσης του ταλαντωτή, deg;
Η μέγιστη τεταγμένη στο διάγραμμα, mm.
 |
Σύνθεση του μηχανισμού.
Η σύνθεση πραγματοποιείται με την αντίστροφη σειρά της ανάλυσης. Ας δοθεί τώρα η γραφική παράσταση (Εικ. 5.9, β), η ελάχιστη ακτίνα του έκκεντρου και το μήκος του ταλαντωτή OB. Απαιτείται η κατασκευή ενός προφίλ κάμερας.
Από ένα αυθαίρετο σημείο O 1 περιγράφουμε έναν κύκλο ελάχιστης ακτίνας (Εικ. 5.9, α). Σε αυτόν τον κύκλο, σε αυθαίρετο σημείο, επιλέγουμε το σημείο Β (που αντιστοιχεί στην αρχή της στροφής του ταλαντωτή). Από το σημείο Β σε μια δεδομένη κατεύθυνση (και αν η κατεύθυνση δεν έχει οριστεί, τότε σε μια αυθαίρετη κατεύθυνση), παραμερίζουμε το μήκος του ταλαντωτή VO. Στη συνέχεια, από το κέντρο O 1, περιγράφουμε έναν κύκλο με ακτίνα O 1 O. Εάν καθοριστεί η κεντρική απόσταση O 1 O και όχι το μήκος του ταλαντωτή VO, τότε ένας κύκλος με αυτή την ακτίνα περιγράφεται αμέσως και ένα αυθαίρετο σημείο Σε αυτό επιλέγεται το O, που αντιστοιχεί στη θέση του ταλαντωτή στην αρχή της ανόδου. Σε αυτόν τον κύκλο, από το σημείο Ο, παραμερίζουμε (στην κατεύθυνση αντίθετη από τη γωνιακή ταχύτητα του έκκεντρου) τη γωνία εργασίας και τη χωρίζουμε σε πολλά ίσα μέρη. Στη συνέχεια, από το κέντρο Ο με ακτίνα ΟΒ, σχεδιάζουμε ένα τόξο και σχεδιάζουμε πάνω του (στην απαιτούμενη κλίμακα) τις γωνιακές μετατοπίσεις του ταλαντωτή, που λαμβάνονται από το δεδομένο γράφημα. Τα σημεία που ανήκουν στο προφίλ του έκκεντρου λαμβάνονται με σερίφ.
Για να γίνει αυτό, από το κέντρο O 1 με ακτίνες ίσες με τις αποστάσεις O 1 1 //, O 1 2 //, O 1 3 //, κ.λπ., σχεδιάζουμε τόξα στα οποία κάνουμε εγκοπές με το μήκος του OB ταλαντωτής από τα σημεία 1, 2, 3 , …, 12, που βρίσκεται σε κύκλο ακτίνας О 1 О. Συνδέοντας τα σημεία 1 / , 2 / , 3 / , …, 12 / (τομές τόξου) με ομαλή καμπύλη, παίρνουμε το πραγματικό προφίλ κάμερας.
5.2.7 Μηχανισμός έκκεντρου στον οποίο το έκκεντρο κινεί ένα ρολό με έναν κύλινδρο
Ανάλυση μηχανισμού.
Ας δοθεί το κινηματικό σχήμα του μηχανισμού έκκεντρου με ταλαντωτή κυλίνδρου (Εικ. 5.10). Απαιτείται κινηματική ανάλυση. Αντικαθιστούμε το πραγματικό έκκεντρο που λειτουργεί κατά μήκος του κυλίνδρου με ένα κεντρικό προφίλ που λειτουργεί κατά μήκος ενός ταλαντωτή με άκρη (η κατασκευή του ως ισαπέχουσας καμπύλης φαίνεται στο τμήμα του κεντρικού προφίλ). Στη συνέχεια πραγματοποιούμε κινηματική ανάλυση του κεντρικού προφίλ του έκκεντρου που λειτουργεί σε δονητή με άκρο (στο Σχ. 5.10 ένας τέτοιος ταλαντωτής φαίνεται με διακεκομμένη γραμμή).
 |
Σύνθεση του μηχανισμού.
Η σύνθεση πραγματοποιείται με την αντίστροφη σειρά της ανάλυσης. Αρχικά, σύμφωνα με ένα δεδομένο χρονοδιάγραμμα, βρίσκεται το κεντρικό προφίλ του έκκεντρου (κατά την κατασκευή του κεντρικού προφίλ, η ελάχιστη ακτίνα του έκκεντρου αυξάνεται κατά την τιμή της ακτίνας του κυλίνδρου).
Στη συνέχεια περνούν από το κεντρικό προφίλ στο πραγματικό κατασκευάζοντας μια ισαπέχουσα καμπύλη προς τα μέσα (στο τμήμα του πραγματικού προφίλ φαίνεται η κατασκευή του ως ισαπέχουσα καμπύλη).
5.2.8 Μηχανισμός έκκεντρου στον οποίο το έκκεντρο λειτουργεί σε επίπεδο ταλαντωτή
Ανάλυση μηχανισμού.
Ας δοθεί το κινηματικό σχήμα του μηχανισμού έκκεντρου με επίπεδο ταλαντωτή (Εικ. 5.11, α). Απαιτείται η πραγματοποίηση κινηματικής ανάλυσης, δηλαδή η κατασκευή γραφήματος.
Το κέντρο περιστροφής O του ταλαντωτή σε αντίστροφη κίνηση θα κινείται κατά μήκος ενός κύκλου ακτίνας O 1 O (Εικ. 5.11, α). Σε αυτόν τον κύκλο, από το σημείο Ο, που αντιστοιχεί στην κάτω θέση (αρχή της ανόδου) του ταλαντωτή, παραμερίζουμε τη γωνία εργασίας προς την αντίθετη κατεύθυνση από τη γωνιακή ταχύτητα του έκκεντρου και τη χωρίζουμε σε 12 ίσα μέρη. Στην αντίστροφη κίνηση, το κέντρο περιστροφής O του ταλαντωτή καταλαμβάνει διαδοχικές θέσεις στον κύκλο O 1 O, που ορίζεται ως 1, 2, 3, ..., 12, που αντιστοιχεί στην περιστροφή του έκκεντρου κατά την ίδια γωνία (κατά 30 0).
Έχοντας αντλήσει από τα σημεία 1, 2, 3 κ.λπ. (κύκλους ακτίνας O 1 O) εφαπτομένες στο προφίλ του έκκεντρου, βρίσκουμε τις διαδοχικές θέσεις του ταλαντωτή σε αντίστροφη κίνηση, που αντιστοιχούν στην περιστροφή του έκκεντρου μέσω του ίδιου γωνία. Βάζοντας το μήκος του ταλαντωτή ΟΑ σε αυτές τις εφαπτομένες, παίρνουμε τα σημεία 1 / , 2 / , 3 / , ..., που είναι διαδοχικές θέσεις του ελεύθερου άκρου Α του ταλαντωτή σε αντίστροφη κίνηση. Εάν καμία από τις θέσεις του ταλαντωτή δεν αγγίζει το πιο απομακρυσμένο σημείο του προφίλ έκκεντρου, τότε μέσω αυτού του σημείου σχεδιάζουμε μια επιπλέον εφαπτομένη, (Εικ. 5.11, α), που αντιστοιχεί στη μέγιστη περιστροφή του ταλαντωτή.
Στην πραγματική κίνηση, όταν ο ταλαντωτής περιστρέφεται, το ελεύθερο άκρο του (σημείο Α) κινείται κατά μήκος ενός τόξου κύκλου ακτίνας ΟΑ. Για να βρεθούν διαδοχικές θέσεις του ελεύθερου άκρου του ταλαντωτή στο τόξο, είναι απαραίτητο να γίνουν εγκοπές από το κέντρο περιστροφής O 1 του έκκεντρου με αποστάσεις ίσες με O 1 1 / , O 1 2 / , O 1 3 / , ...; παίρνουμε σημεία 1 // , 2 // , 3 // , ... Αν αυτά τα σημεία συνδέονται με το κέντρο περιστροφής Ο του ταλαντωτή, τότε θα λάβουμε διαδοχικές θέσεις του ταλαντωτή που αντιστοιχούν στην περιστροφή του έκκεντρου κατά την ίδια γωνία (κατά 30 0).
Και η κεντρική απόσταση O 1 O (Εικ. 5.11, α). Σε έναν κύκλο ακτίνας O 1 O, επιλέγουμε το κέντρο περιστροφής του ταλαντωτή O σε αυθαίρετη θέση, το αφήνουμε στην άκρη από αυτό (στην πλευρά απέναντι από τη γωνιακή ταχύτητα, παίρνουμε την πρώτη θέση του ταλαντωτή συνδέοντας σημεία 2 και - η δεύτερη θέση του ταλαντωτή, κ.λπ. Το πραγματικό προφίλ του έκκεντρου θα είναι το περίβλημα όλων των θέσεων του ταλαντωτή.
Για να είναι πιο ακριβές το προφίλ έκκεντρου, είναι απαραίτητο να βρούμε όσο το δυνατόν περισσότερες θέσεις του ταλαντωτή.
Σχεδιασμός κάμερας
Περίληψη: Μηχανισμοί κάμερας. Σκοπός και πεδίο εφαρμογής. Η επιλογή του νόμου κίνησης του ωστήρα του μηχανισμού έκκεντρου. Ταξινόμηση μηχανισμών έκκεντρου. Βασικές παράμετροι. Γεωμετρική ερμηνεία του αναλόγου της ταχύτητας. Επίδραση της γωνίας πίεσης στη λειτουργία του μηχανισμού έκκεντρου. Σύνθεση του μηχανισμού έκκεντρου. Στάδια σύνθεσης. Επιλογή της ακτίνας του κυλίνδρου (στρογγυλοποίηση του τμήματος εργασίας του ωστήρα).
Μηχανισμοί κάμερας
Η διαδικασία εργασίας πολλών μηχανών καθιστά απαραίτητο να υπάρχουν μηχανισμοί στη σύνθεσή τους, η κίνηση των συνδέσμων εξόδου των οποίων πρέπει να πραγματοποιείται αυστηρά σύμφωνα με έναν δεδομένο νόμο και να συντονίζεται με την κίνηση άλλων μηχανισμών. Οι πιο απλοί, αξιόπιστοι και συμπαγείς για την εκτέλεση μιας τέτοιας εργασίας είναι οι μηχανισμοί έκκεντρου.
Κουλάτσκοφ καλείταιένας μηχανισμός τριών συνδέσμων με υψηλότερο κινηματικό ζεύγος του οποίου ο σύνδεσμος εισόδου ονομάζεται έκκεντρο, και την έξοδο ωθών(ή rocker).
έκκεντροονομάζεται ο σύνδεσμος στον οποίο ανήκει το στοιχείο του υψηλότερου κινηματικού ζεύγους, κατασκευασμένο με τη μορφή επιφάνειας μεταβλητής καμπυλότητας.
Καλείται μια ευθύγραμμα κινούμενη ζεύξη εξόδου ωθώνκαι περιστρεφόμενη (αιωρούμενη) - κουνιστή πολυθρόνα.
Συχνά, για να αντικατασταθεί η τριβή ολίσθησης με τριβή κύλισης στο υψηλότερο ζεύγος και να μειωθεί η φθορά, τόσο του έκκεντρου όσο και του ωστηρίου, περιλαμβάνεται ένας πρόσθετος σύνδεσμος στο διάγραμμα μηχανισμού - ένας κύλινδρος και ένα περιστροφικό κινηματικό ζεύγος. Η κινητικότητα σε αυτό το κινηματικό ζεύγος δεν αλλάζει τις λειτουργίες μεταφοράς του μηχανισμού και είναι τοπική κινητικότητα.
Αναπαράγουν την κίνηση του συνδέσμου εξόδου - ώθησης θεωρητικά ακριβώς. Ο νόμος της κίνησης του προωθητή, που δίνεται από τη συνάρτηση μεταφοράς, καθορίζεται από το προφίλ του έκκεντρου και είναι το κύριο χαρακτηριστικό του μηχανισμού έκκεντρου, από τον οποίο εξαρτώνται οι λειτουργικές του ιδιότητες, καθώς και οι δυναμικές και δονητικές ιδιότητες. Ο σχεδιασμός του μηχανισμού έκκεντρου χωρίζεται σε διάφορα στάδια: την εκχώρηση του νόμου κίνησης του ωθητή, την επιλογή ενός μπλοκ διαγράμματος, τον προσδιορισμό των κύριων και συνολικών διαστάσεων, τον υπολογισμό των συντεταγμένων του προφίλ έκκεντρου .
Σκοπός και πεδίο εφαρμογής
Οι μηχανισμοί έκκεντρου έχουν σχεδιαστεί για να μετατρέπουν την περιστροφική ή μεταφορική κίνηση του έκκεντρου σε παλινδρομική περιστροφική ή παλινδρομική κίνηση του ωθητή. Ένα σημαντικό πλεονέκτημα των μηχανισμών έκκεντρου είναι η ικανότητα να παρέχουν ακριβείς θέσεις της ζεύξης εξόδου. Αυτό το πλεονέκτημα καθόρισε την ευρεία εφαρμογή τους στις απλούστερες κυκλικές αυτόματες συσκευές και σε μηχανικές υπολογιστικές συσκευές (αριθμόμετρα, ημερολογιακούς μηχανισμούς). Οι μηχανισμοί έκκεντρου μπορούν να χωριστούν σε δύο ομάδες. Οι μηχανισμοί του πρώτου εξασφαλίζουν την κίνηση του προωθητή σύμφωνα με έναν δεδομένο νόμο κίνησης. Οι μηχανισμοί της δεύτερης ομάδας παρέχουν μόνο την καθορισμένη μέγιστη μετατόπιση του συνδέσμου εξόδου - την διαδρομή του ωστήρα. Στην περίπτωση αυτή, ο νόμος με τον οποίο εκτελείται αυτή η κίνηση επιλέγεται από ένα σύνολο τυπικών νόμων κίνησης, ανάλογα με τις συνθήκες λειτουργίας και την τεχνολογία κατασκευής.
Η επιλογή του νόμου κίνησης του ωστήρα του μηχανισμού έκκεντρου
Ο νόμος της κίνησης του ωθητήονομάζεται η συνάρτηση μετατόπισης (γραμμική ή γωνιακή) του ωθητή, καθώς και μια από τις παράγωγές της, που λαμβάνονται στο χρόνο ή μια γενικευμένη συντεταγμένη - η μετατόπιση του οδηγού συνδέσμου - το έκκεντρο. Όταν σχεδιάζετε έναν μηχανισμό έκκεντρου από δυναμική άποψη, συνιστάται να προχωρήσετε από τον νόμο της αλλαγής στην επιτάχυνση του ωστήρα, καθώς οι επιταχύνσεις είναι που καθορίζουν τις δυνάμεις αδράνειας που προκύπτουν κατά τη λειτουργία του μηχανισμού.
Υπάρχουν τρεις ομάδες νόμων κίνησης, που χαρακτηρίζονται από τα ακόλουθα χαρακτηριστικά:
1. η κίνηση του ωθητή συνοδεύεται από δυνατά χτυπήματα,
2. η κίνηση του ωστήρα συνοδεύεται από μαλακές κρούσεις,
3. Η κίνηση του ωθητή γίνεται χωρίς κραδασμούς.
Πολύ συχνά, σύμφωνα με τις συνθήκες παραγωγής, είναι απαραίτητο να μετακινήσετε το ωστήριο με σταθερή ταχύτητα. Όταν εφαρμόζεται ένας τέτοιος νόμος κίνησης του ωθητή στη θέση μιας απότομης αλλαγής της ταχύτητας, η επιτάχυνση θεωρητικά φτάνει στο άπειρο και τα δυναμικά φορτία πρέπει επίσης να είναι απείρως μεγάλα. Στην πράξη, λόγω της ελαστικότητας των συνδέσμων, δεν επιτυγχάνεται ένα απείρως μεγάλο δυναμικό φορτίο, αλλά το μέγεθός του εξακολουθεί να είναι πολύ μεγάλο. Τέτοιες κρούσεις ονομάζονται «σκληρές» και επιτρέπονται μόνο σε μηχανισμούς χαμηλής ταχύτητας και με μικρά βάρη του προωθητή.
Οι μαλακές κρούσεις συνοδεύονται από τη λειτουργία του μηχανισμού έκκεντρου εάν η συνάρτηση ταχύτητας δεν έχει ασυνέχεια, αλλά η λειτουργία επιτάχυνσης (ή ανάλογο επιτάχυνσης) του ωστήρα υφίσταται ασυνέχεια. Μια στιγμιαία αλλαγή στην επιτάχυνση κατά ένα πεπερασμένο ποσό προκαλεί μια απότομη αλλαγή στις δυναμικές δυνάμεις, η οποία εκδηλώνεται επίσης με τη μορφή κραδασμού. Ωστόσο, αυτές οι επιθέσεις είναι λιγότερο επικίνδυνες.
Ο εκκεντροφόρος μηχανισμός λειτουργεί ομαλά, χωρίς κραδασμούς, εάν οι λειτουργίες της ταχύτητας και της επιτάχυνσης του ωστήρα δεν υποστούν θραύση, αλλάζει ομαλά και υπό την προϋπόθεση ότι οι ταχύτητες και οι επιταχύνσεις στην αρχή και στο τέλος της κίνησης είναι ίσες με μηδέν.
Ο νόμος της κίνησης του ωθητή μπορεί να δοθεί τόσο σε αναλυτική μορφή - με τη μορφή εξίσωσης και σε γραφική μορφή - με τη μορφή διαγράμματος. Σε εργασίες για ένα έργο μαθημάτων, βρίσκονται οι ακόλουθοι νόμοι αλλαγής στα ανάλογα επιταχύνσεων του κέντρου του κυλίνδρου ώθησης, που δίνονται με τη μορφή διαγραμμάτων:
Ο ομοιόμορφα επιταχυνόμενος νόμος αλλαγής του αναλόγου της επιτάχυνσης ώθησης, με τον ομοιόμορφα επιταχυνόμενο νόμο της κίνησης ώθησης, ο σχεδιασμένος μηχανισμός έκκεντρου θα υποστεί απαλούς κραδασμούς στην αρχή και στο τέλος κάθε διαστήματος.
Ο τριγωνικός νόμος αλλαγής του αναλόγου της επιτάχυνσης εξασφαλίζει τη λειτουργία χωρίς κραδασμούς του μηχανισμού έκκεντρου.
Ο τραπεζοειδής νόμος της αλλαγής του αναλόγου της επιτάχυνσης εξασφαλίζει επίσης τη λειτουργία του μηχανισμού χωρίς κραδασμούς.
Ημιτονοειδής νόμος μεταβολής του αναλόγου της επιτάχυνσης. Παρέχει τη μεγαλύτερη ομαλότητα της κίνησης (χαρακτηριστικό είναι ότι όχι μόνο η ταχύτητα και η επιτάχυνση, αλλά και τα παράγωγα υψηλότερης τάξης αλλάζουν ομαλά). Ωστόσο, για αυτόν τον νόμο κίνησης, η μέγιστη επιτάχυνση στις ίδιες γωνίες φάσης και η διαδρομή του ωθητή είναι μεγαλύτερη από ό,τι στην περίπτωση ομοιόμορφα επιταχυνόμενων και τραπεζοειδών νόμων αλλαγής στα ανάλογα επιταχύνσεων. Το μειονέκτημα αυτού του νόμου κίνησης είναι ότι η αύξηση της ταχύτητας στην αρχή της ανόδου και, κατά συνέπεια, η ίδια η άνοδος είναι αργή.
Ο συνημιτονοειδής νόμος μεταβολής του αναλόγου της επιτάχυνσης προκαλεί ήπιους κραδασμούς στην αρχή και στο τέλος της διαδρομής ώθησης. Ωστόσο, με τον νόμο του συνημιτονοειδούς, υπάρχει μια ταχεία αύξηση της ταχύτητας στην αρχή της διαδρομής και η γρήγορη μείωση της στο τέλος, κάτι που είναι επιθυμητό όταν λειτουργούν πολλοί μηχανισμοί έκκεντρου.
Από την άποψη των δυναμικών φορτίων, είναι επιθυμητοί νόμοι χωρίς κραδασμούς. Ωστόσο, οι κάμερες με τέτοιους νόμους κίνησης είναι τεχνολογικά πιο περίπλοκες, καθώς απαιτούν πιο ακριβή και πολύπλοκο εξοπλισμό, επομένως η κατασκευή τους είναι πολύ πιο ακριβή. Οι νόμοι με σκληρές κρούσεις έχουν πολύ περιορισμένη εφαρμογή και χρησιμοποιούνται σε μη κρίσιμους μηχανισμούς σε χαμηλές ταχύτητες και χαμηλή αντοχή. Κάμερες με νόμους χωρίς κραδασμούς συνιστάται να χρησιμοποιούνται σε μηχανισμούς με υψηλές ταχύτητες κίνησης με αυστηρές απαιτήσεις για ακρίβεια και ανθεκτικότητα. Οι πιο διαδεδομένοι είναι οι νόμοι της κίνησης με μαλακές κρούσεις, με τη βοήθεια των οποίων είναι δυνατόν να παρέχεται ένας ορθολογικός συνδυασμός του κόστους κατασκευής και των λειτουργικών χαρακτηριστικών του μηχανισμού.
Η δύναμη που επενεργεί στον ωθητή από την πλευρά του έκκεντρου και που τον αναγκάζει να κινηθεί κατευθύνεται κατά μήκος της κανονικής προς το έκκεντρο στο σημείο επαφής με τον ωστήρα. Επομένως, στη γενική περίπτωση, κατευθύνεται υπό γωνία ως προς την κατεύθυνση κίνησης του ωστήρα (Εικόνα 46).
Εικόνα 46
Η γωνία μεταξύ της δύναμης που ασκεί το ωστήριο και της κατεύθυνσης της κίνησής του ονομάζεται γωνία πίεσης(σημαίνει α), και η γωνία μεταξύ της ενεργού δύναμης και της διεύθυνσης κάθετης προς την κατεύθυνση κίνησης του ωστήρα ονομάζεται γωνία μετάδοσης(σημειώνεται γ). Συνολικά, αυτές οι γωνίες συνθέτουν μια γωνία ίση με 90 0, επομένως, όταν εξετάζετε τη λειτουργικότητα του μηχανισμού, λαμβάνοντας υπόψη την κατεύθυνση μεταφοράς δύναμης, μπορείτε να λειτουργήσετε με οποιαδήποτε από αυτές.
Με μείωση της γωνίας μετάδοσης της κίνησης, η κινητήρια συνιστώσα της ενεργούσας δύναμης μειώνεται (η συνιστώσα συμπίπτει με την κατεύθυνση κίνησης του ωθητή). Ταυτόχρονα, το εξάρτημα που πιέζει τον ωθητή στους οδηγούς αυξάνεται, αυξάνοντας τη δύναμη τριβής μεταξύ του ωστηρίου και του στηρίγματος, γεγονός που εμποδίζει τον ωστήρα να κινηθεί.
V T = S’∙ω cool
Ωστόσο, μια αύξηση στην ελάχιστη περιφέρεια ακτίνας οδηγεί σε αύξηση των διαστάσεων, του βάρους και της κατανάλωσης υλικού ολόκληρης της κατασκευής. Επομένως, το καθήκον της δυναμικής σύνθεσης είναι να προσδιορίσει μια τέτοια τιμή rmin, στην οποία η γωνία μετάδοσης της κίνησης δεν θα ήταν μικρότερη από αυτή που επιτρέπεται σε όλες τις θέσεις του μηχανισμού και οι διαστάσεις θα ήταν ελάχιστες.
Η λύση του προβλήματος της δυναμικής σύνθεσης γίνεται γραφικά. Χρησιμοποιείται η ακόλουθη τεχνική (βλ. Εικόνα 46β): εάν το τμήμα OW μετακινηθεί παράλληλα με το ίδιο, ευθυγραμμίζοντας το σημείο W με το σημείο Α και σχεδιάστε μια ευθεία γραμμή υπό γωνία
γ σε αυτό μέσω του δεύτερου σημείου Ο, τότε θα περάσει από το κέντρο περιστροφής του έκκεντρου (δηλαδή, σχηματίζεται μια γραμμή Ο-Ο, παράλληλη προς το κανονικό Ν-Ν και διέρχεται από το κέντρο περιστροφής του έκκεντρου).
Για τον προσδιορισμό του r min, δημιουργείται ένα διάγραμμα, σχεδιάζοντας κατά μήκος του άξονα y τις τιμές των μετατοπίσεων του ωθητή ( Σι) για θέσεις «p» του μηχανισμού σύμφωνα με τον δεδομένο νόμο κίνησης. Από κάθε σημειωμένο σημείο, παράλληλα με τον άξονα της τετμημένης, απεικονίζεται η τιμή του αναλόγου των ταχυτήτων που αντιστοιχεί σε αυτή τη θέση ( Σι'). Οι μετατοπίσεις και τα ανάλογα των ταχυτήτων πρέπει να απεικονίζονται στην ίδια κλίμακα (Εικόνα 47).

Εικόνα 47
Τα άκρα των τμημάτων των αναλόγων ταχύτητας συνδέονται με μια ομαλή καμπύλη και οι εφαπτομένες σε αυτήν έλκονται δεξιά και αριστερά υπό γωνία γ minστον άξονα x ( γ min- την ελάχιστη επιτρεπόμενη γωνία μετάδοσης κίνησης από την προϋπόθεση της απουσίας εμπλοκής). Αυτές οι δύο ευθείες διαχωρίζουν την επιτρεπόμενη ζώνη για την επιλογή του κέντρου περιστροφής του έκκεντρου (κάτω από αυτές τις γραμμές) από την απαγορευμένη.
Η επιλογή του κέντρου περιστροφής του έκκεντρου σε οποιοδήποτε σημείο της επιτρεπόμενης ζώνης διασφαλίζει ότι δεν υπάρχει εμπλοκή σε όλες τις θέσεις του μηχανισμού. Για να εξασφαλιστούν ελάχιστες διαστάσεις, είναι απαραίτητο να επιλέξετε το κέντρο περιστροφής του έκκεντρου στα όρια της επιτρεπόμενης ζώνης (ή με μια μικρή απόκλιση από τα όρια, παρέχοντας κάποιο περιθώριο για τη γωνία μετάδοσης). Αυτή η μέθοδος επιτρέπει επίσης την πιο ορθολογική επιλογή εκκεντρικότητας.
Όταν σχεδιάζετε έναν μηχανισμό με έναν ωθητή, οι προσεγγίσεις για την επίλυση του προβλήματος της δυναμικής σύνθεσης είναι παρόμοιες. Ωστόσο, σε αυτή την περίπτωση, η γωνία μετάδοσης της κίνησης μετράται από την αντίστοιχη θέση του βραχίονα στροφέα. Επομένως, κατά τον προσδιορισμό της επιτρεπόμενης ζώνης, για να επιλέξετε το κέντρο περιστροφής του έκκεντρου, οι ακτίνες σχεδιάζονται υπό γωνία
γ minσε κάθε θέση rocker. Ως αποτέλεσμα, η επιτρεπόμενη ζώνη καθορίζεται από τη διασταύρωση πολλών δοκών (Εικόνα 48).

Εικόνα 48
Όταν σχεδιάζετε έναν μηχανισμό με ώθηση παλινδρόμησης, τίθεται ο νόμος της περιστροφικής κίνησης του λικνιστή. Επομένως, οι παράμετροι της γωνιακής κίνησης θα είναι γνωστές (η γωνία περιστροφής του βραχίονα στροφέα, το ανάλογο της γωνιακής ταχύτητας, το ανάλογο της γωνιακής επιτάχυνσης). Για να προσδιορίσετε το ανάλογο των ταχυτήτων, το οποίο εναποτίθεται από το άκρο του βραχίονα σε κάθε θέση του, είναι απαραίτητο να πολλαπλασιάσετε το ανάλογο της γωνιακής ταχύτητας με το μήκος του βραχίονα:

Σε μηχανισμούς με επίπεδο ωστήρα, η γωνία μετάδοσης της κίνησης καθορίζεται από τη γωνία μεταξύ της πλάκας ώθησης και της ίδιας της ώθησης (ο άξονας της μεταφορικής της κίνησης). Επομένως, από την άποψη της μεταφοράς κίνησης, η πιο συμφέρουσα τιμή αυτής της γωνίας είναι 90 0 .
Από την άποψη της τεχνολογίας κατασκευής του ωστηρίου και συναρμολόγησης του μηχανισμού, η γωνία μεταξύ του ωστηρίου και της πλάκας του, ίση με 90 0, είναι επίσης η πιο συμφέρουσα. Επομένως, αυτή η περίπτωση χρησιμοποιείται συνήθως στην πράξη. Σε αυτή την περίπτωση, ολόκληρη η δύναμη που ενεργεί από την πλευρά του έκκεντρου στον ωστήρα, σε όλες τις θέσεις του μηχανισμού, είναι η κινητήρια δύναμη (δεν υπάρχει εξάρτημα που πιέζει τον ωστήρα στους οδηγούς).
Έτσι, το φαινόμενο της εμπλοκής για αυτόν τον τύπο μηχανισμού δεν είναι σχετικό. Ωστόσο, το έκκεντρο πρέπει να έχει ένα κυρτό προφίλ σε όλα τα σημεία (επειδή ένα επίπεδο δακτύλιο δεν μπορεί να λειτουργήσει με κοίλες περιοχές). Αποδεικνύεται ότι όσο μεγαλύτερη είναι η τιμή του κύκλου της ελάχιστης ακτίνας, τόσο μικρότερη είναι η πιθανότητα σχηματισμού κοίλων τμημάτων στο προφίλ. Επομένως, σε αυτήν την περίπτωση, επιλύεται ένα πρόβλημα παρόμοιο με το πρόβλημα της δυναμικής σύνθεσης - επιλέξτε r min έτσι ώστε να μην υπάρχουν κοίλες τομές στο προφίλ και οι διαστάσεις να είναι ελάχιστες (με άλλα λόγια, το r min επιλέγεται από τη συνθήκη της κυρτότητας του έκκεντρου).
Πλεονεκτήματα των μηχανισμών έκκεντρου
Όλοι οι μηχανισμοί με VKP είναι χαμηλής σύνδεσης, επομένως, καθιστούν δυνατή τη μείωση των διαστάσεων του μηχανήματος στο σύνολό του.
Ευκολία σύνθεσης και σχεδίασης.
Οι μηχανισμοί με VKP αναπαράγουν τη λειτουργία μεταφοράς με μεγαλύτερη ακρίβεια.
Παρέχετε μια μεγάλη ποικιλία νόμων κίνησης του συνδέσμου εξόδου.
Οι μηχανισμοί με VKP πρέπει να έχουν ισχύ ή γεωμετρικό κλείσιμο.
Οι δυνάμεις επαφής στο HCP είναι πολύ υψηλότερες από ό,τι στο LCP, γεγονός που οδηγεί σε φθορά, δηλ. 2 προφίλ χάνουν το σχήμα τους και, ως εκ τούτου, το κύριο πλεονέκτημά τους.
Η πολυπλοκότητα της επεξεργασίας του προφίλ του έκκεντρου.
Η αδυναμία εργασίας σε υψηλές ταχύτητες και μετάδοσης υψηλών δυνάμεων.
Οι κύριες παράμετροι του μηχανισμού έκκεντρου
Το προφίλ του έκκεντρου μπορεί να αποτελείται από τόξα δύο ομόκεντρων κύκλων και καμπυλών που κάνουν τη μετάβαση από τον έναν κύκλο στον άλλο.
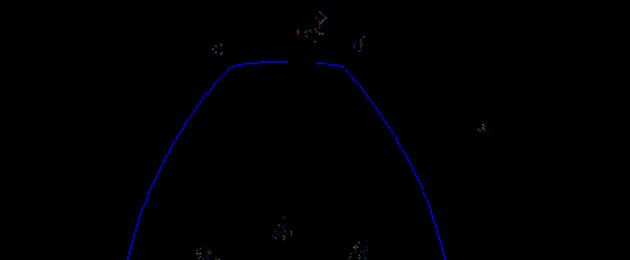
Οι περισσότεροι μηχανισμοί έκκεντρου είναι κυκλικοί μηχανισμοί με ίση περίοδο κύκλου. Όταν το έκκεντρο περιστρέφεται, ο προωθητής εκτελεί παλινδρομικές ή παλινδρομικές περιστροφικές κινήσεις με ένα στοπ στην επάνω και στην κάτω θέση. Έτσι, στον κύκλο κίνησης του ωθητή, στη γενική περίπτωση, διακρίνονται τέσσερις φάσεις: αφαίρεση, μακρινή στάση (ή ορθοστασία), προσέγγιση και κοντινή στάση. Αντίστοιχα, οι γωνίες έκκεντρου ή οι γωνίες φάσης χωρίζονται σε:
Γωνία αφαίρεσης (ανύψωσης).
Γωνία μακρινής (άνω) βάσης
Γωνία προσέγγισης (κάθοδος)
Η γωνία της πλησιέστερης (κάτω) στάσης.
Το άθροισμα τριών γωνιών σχηματίζει μια γωνία που ονομάζεται γωνία εργασίας.
Σε συγκεκριμένες περιπτώσεις, μπορεί να μην υπάρχουν γωνίες της άνω και κάτω ανόδου, τότε.
Το έκκεντρο μηχανισμού χαρακτηρίζεται από δύο προφίλ:
Κέντρο (ή θεωρητικό)
Εποικοδομητικό (ή εργασιακό).
Κάτω από εποικοδομητικόςαναφέρεται στο εξωτερικό προφίλ λειτουργίας του έκκεντρου.
Θεωρητικό ή κέντροονομάζεται ένα προφίλ, το οποίο στο σύστημα συντεταγμένων του έκκεντρου περιγράφει το κέντρο του κυλίνδρου (ή στρογγυλοποίηση του προφίλ εργασίας του ωστήρα) όταν ο κύλινδρος κινείται κατά μήκος του κατασκευαστικού προφίλ του έκκεντρου.
φάσηονομάζεται γωνία περιστροφής του έκκεντρου.
γωνία προφίλονομάζεται γωνιακή συντεταγμένη του τρέχοντος σημείου εργασίας του θεωρητικού προφίλ, που αντιστοιχεί στην τρέχουσα γωνία φάσης. Γενικά, η γωνία φάσης δεν είναι ίση με τη γωνία προφίλ.
Η κίνηση του ωστήρα και η γωνία περιστροφής του έκκεντρου υπολογίζονται από την αρχή της φάσης ανύψωσης, δηλ. από την χαμηλότερη θέση του κέντρου του κυλίνδρου, που βρίσκεται σε απόσταση από το κέντρο περιστροφής του έκκεντρου. Αυτή η απόσταση ονομάζεται αρχική ακτίναή την ακτίνα της μηδενικής αρχικής ροδέλας και συμπίπτει με το διάνυσμα ελάχιστης ακτίνας του κεντρικού προφίλ έκκεντρου.
Καλείται η μέγιστη μετατόπιση του συνδέσμου εξόδου εγκεφαλικό επεισόδιο ώθησης.
Εξωθητήρας εκτός άξονα - εκκεντρότητα - για έκκεντρα με μεταφορική κίνηση ώθησης.
Κεντρική απόσταση - η απόσταση μεταξύ του κέντρου περιστροφής του έκκεντρου και του σταθερού σημείου του βραχίονα - για έκκεντρα με ώθηση παλινδρόμησης.
Η γωνία πίεσης είναι η γωνία μεταξύ της ταχύτητας στο σημείο επαφής και της κανονικής προς το προφίλ (δηλαδή την κατεύθυνση της δύναμης). Συνήθως αυτή η γωνία συμβολίζεται ή. Και σε ένα σημείο επαφής, δύο προφίλ έχουν διαφορετική γωνία πίεσης.
Χωρίς τριβή, η δύναμη κατευθύνεται κατά μήκος της κοινής κανονικής στο σημείο επαφής των προφίλ. Έτσι, σε έναν μηχανισμό έκκεντρου, η γωνία πίεσης είναι η γωνία μεταξύ του κανονικού προς το κεντρικό προφίλ του έκκεντρου και της ταχύτητας του κέντρου του κυλίνδρου.
Οι διαστάσεις του μηχανισμού έκκεντρου καθορίζονται από κινηματικές, δυναμικές και δομικές συνθήκες.
- Κινηματικές συνθήκες - εξασφάλιση της αναπαραγωγής ενός δεδομένου νόμου κίνησης του ωθητή.
- Dynamic - εξασφαλίζοντας υψηλή απόδοση και χωρίς εμπλοκές.
- Δομικό - εξασφάλιση του ελάχιστου μεγέθους του μηχανισμού, αντοχής και αντοχής στη φθορά.
Γεωμετρική ερμηνεία αναλογικής ταχύτητας ώθησης
Έκκεντρο και ωθητής από VKP. Ο προωθητής κινείται προς τα εμπρός, επομένως, η ταχύτητά του είναι παράλληλη με τον οδηγό. Το έκκεντρο εκτελεί μια περιστροφική κίνηση, επομένως η ταχύτητά του κατευθύνεται κάθετα στην ακτίνα περιστροφής στο τρέχον σημείο και η σχετική ταχύτητα ολίσθησης των προφίλ κατευθύνεται κατά μήκος μιας κοινής εφαπτομένης σε αυτά.
όπου, a είναι ο στύλος εμπλοκής στο VKP, ο οποίος βρίσκεται στη διασταύρωση της κάθετης προς τα προφίλ στο σημείο επαφής με τη γραμμή των κέντρων. Επειδή ο προωθητής κινείται προς τα εμπρός, τότε το κέντρο περιστροφής του βρίσκεται στο άπειρο και η γραμμή των κέντρων διέρχεται κάθετα προς την ταχύτητα μέσα από το κέντρο του έκκεντρου.
Το τρίγωνο της ταχύτητας και είναι παρόμοια με τρίγωνα με αμοιβαία κάθετες πλευρές, δηλ. ο λόγος των αντίστοιχων πλευρών είναι σταθερός και ίσος με τον συντελεστή ομοιότητας: , από όπου.
Εκείνοι. το ανάλογο της ταχύτητας ώθησης αντιπροσωπεύεται από ένα τμήμα κάθετο στην ταχύτητα ώθησης, το οποίο κόβεται από μια ευθεία γραμμή παράλληλη προς την κανονική επαφή και που διέρχεται από το κέντρο του έκκεντρου.
Σκεύασμα σύνθεσης: Εάν, στη συνέχεια μιας δοκού που τραβιέται από το κέντρο του κυλίνδρου κάθετα στην ταχύτητα του ωστήρα, ένα τμήμα μήκους παραμερίζεται από το σημείο και μια ευθεία γραμμή παράλληλη προς την κανονική επαφή τραβιέται στο άκρο αυτού του τμήματος , τότε αυτή η ευθεία γραμμή θα περάσει από το κέντρο περιστροφής του σημείου προπορευόμενου συνδέσμου (έκκεντρο).
Έτσι, για να λάβετε ένα τμήμα που απεικονίζει ένα ανάλογο της ταχύτητας του ωστήρα, είναι απαραίτητο να ενεργοποιήσετε το διάνυσμα ταχύτητας του ωστήρα προς την κατεύθυνση περιστροφής του έκκεντρου.
Επίδραση της γωνίας πίεσης στη λειτουργία του μηχανισμού έκκεντρου
Η μείωση της αρχικής ακτίνας του έκκεντρου, ενώ άλλα πράγματα είναι ίσα, οδηγεί σε αύξηση των γωνιών πίεσης. Με την αύξηση των γωνιών πίεσης, οι δυνάμεις που δρουν στους συνδέσμους του μηχανισμού αυξάνονται, η απόδοση του μηχανισμού μειώνεται και προκύπτει η πιθανότητα αυτοφρεναρίσματος (μπλοκάρισμα του μηχανισμού), δηλ. Καμία δύναμη από την πλευρά του προπορευόμενου συνδέσμου (έκκεντρο) δεν μπορεί να μετακινήσει τον οδηγούμενο (ωθητήρα) από τη θέση του. Επομένως, για να διασφαλιστεί η αξιόπιστη λειτουργία του μηχανισμού έκκεντρου, είναι απαραίτητο να επιλέξετε τις κύριες διαστάσεις του με τέτοιο τρόπο ώστε η γωνία πίεσης σε καμία από τις θέσεις να μην υπερβαίνει μια ορισμένη επιτρεπόμενη τιμή.
Κατά τον προσδιορισμό των κύριων διαστάσεων του εκκεντροφόρου μηχανισμού με ώθηση στροφείου, αρκεί η γωνία πίεσης σε καμία από τις θέσεις του μηχανισμού να μην υπερβαίνει
Σύνθεση του μηχανισμού έκκεντρου. Στάδια σύνθεσης
Στη σύνθεση ενός μηχανισμού έκκεντρου, όπως και στη σύνθεση οποιουδήποτε μηχανισμού, επιλύονται μια σειρά από εργασίες, από τις οποίες δύο εξετάζονται στο μάθημα TMM: η επιλογή ενός μπλοκ διαγράμματος και ο προσδιορισμός των κύριων διαστάσεων των συνδέσμων του μηχανισμού (συμπεριλαμβανομένου του προφίλ έκκεντρου).
Το πρώτο στάδιο της σύνθεσης είναι δομικό.Το μπλοκ διάγραμμα καθορίζει τον αριθμό των συνδέσμων στον μηχανισμό. αριθμός, τύπος και κινητικότητα κινηματικών ζευγών· τον αριθμό των περιττών συνδέσεων και την τοπική κινητικότητα. Στη δομική σύνθεση, είναι απαραίτητο να αιτιολογηθεί η εισαγωγή του μηχανισμού κάθε πλεονάζοντος δεσμού και τοπικής κινητικότητας στο σχήμα. Οι καθοριστικές συνθήκες για την επιλογή ενός μπλοκ διαγράμματος είναι: ένας δεδομένος τύπος μετασχηματισμού κίνησης, η θέση των αξόνων των συνδέσμων εισόδου και εξόδου. Η κίνηση εισόδου στον μηχανισμό μετατρέπεται σε έξοδο, για παράδειγμα, περιστροφική σε περιστροφική, περιστροφική σε μεταφορική κ.λπ. Εάν οι άξονες είναι παράλληλοι, τότε επιλέγεται ένα επίπεδο σχέδιο μηχανισμού. Με άξονες τομής ή διέλευσης, πρέπει να χρησιμοποιείται χωροταξικό σχήμα. Στους κινηματικούς μηχανισμούς, τα φορτία είναι μικρά, επομένως μπορούν να χρησιμοποιηθούν ωθητές με μυτερή άκρη. Στους μηχανισμούς ισχύος, για να αυξηθεί η αντοχή και να μειωθεί η φθορά, εισάγεται ένας κύλινδρος στο κύκλωμα του μηχανισμού ή αυξάνεται η μειωμένη ακτίνα καμπυλότητας των επιφανειών επαφής του άνω ζεύγους.
Το δεύτερο στάδιο της σύνθεσης είναι το μετρικό.Σε αυτό το στάδιο καθορίζονται οι κύριες διαστάσεις των συνδέσμων του μηχανισμού, οι οποίες παρέχουν έναν δεδομένο νόμο για τον μετασχηματισμό της κίνησης στον μηχανισμό ή μια δεδομένη συνάρτηση μεταφοράς. Όπως σημειώθηκε παραπάνω, η συνάρτηση μεταφοράς είναι ένα καθαρά γεωμετρικό χαρακτηριστικό του μηχανισμού και, επομένως, το πρόβλημα της μετρικής σύνθεσης είναι ένα καθαρά γεωμετρικό πρόβλημα, ανεξάρτητο από το χρόνο ή την ταχύτητα. Τα κύρια κριτήρια με τα οποία καθοδηγείται ο σχεδιαστής κατά την επίλυση προβλημάτων μετρικής σύνθεσης είναι: ελαχιστοποίηση διαστάσεων και, κατά συνέπεια, μάζας. ελαχιστοποίηση της γωνίας πίεσης στο ζεύγος σας. αποκτώντας μια κατασκευάσιμη μορφή του προφίλ έκκεντρου.
Επιλογή της ακτίνας του κυλίνδρου (στρογγυλοποίηση της περιοχής εργασίας του ωστήρα)
Κατά την επιλογή της ακτίνας του κυλίνδρου, λαμβάνονται υπόψη οι ακόλουθες σκέψεις:
Ο κύλινδρος είναι ένα απλό μέρος, η επεξεργασία του οποίου δεν είναι περίπλοκη (γυρισμένο, στη συνέχεια θερμική επεξεργασία και στίλβωση). Επομένως, μπορεί να εξασφαλιστεί υψηλή αντοχή επαφής στην επιφάνειά του. Στο έκκεντρο, λόγω της πολύπλοκης διαμόρφωσης της επιφάνειας εργασίας, αυτό είναι πιο δύσκολο να επιτευχθεί. Επομένως, συνήθως η ακτίνα του κυλίνδρου είναι μικρότερη από την ακτίνα της αρχικής ροδέλας του δομικού προφίλ και ικανοποιεί τη σχέση, όπου είναι η ακτίνα της αρχικής ροδέλας του θεωρητικού προφίλ του έκκεντρου. Η συμμόρφωση με αυτή την αναλογία παρέχει περίπου ίση αντοχή επαφής τόσο για το έκκεντρο όσο και για τον κύλινδρο. Ο κύλινδρος έχει μεγαλύτερη αντοχή επαφής, αλλά επειδή η ακτίνα του είναι μικρότερη, περιστρέφεται με μεγαλύτερη ταχύτητα και τα σημεία εργασίας της επιφάνειάς του συμμετέχουν σε μεγαλύτερο αριθμό επαφών.
Το προφίλ σχεδίασης του έκκεντρου δεν πρέπει να είναι αιχμηρό ή κομμένο. Επομένως, επιβάλλεται περιορισμός στην επιλογή της ακτίνας του κυλίνδρου, όπου είναι η ελάχιστη ακτίνα καμπυλότητας του θεωρητικού προφίλ έκκεντρου.
Συνιστάται να επιλέξετε μια ακτίνα κυλίνδρου από μια τυπική σειρά διαμέτρων στην περιοχή. Σε αυτή την περίπτωση, θα πρέπει να ληφθεί υπόψη ότι η αύξηση της ακτίνας του κυλίνδρου αυξάνει τις διαστάσεις και τη μάζα του ωστήρα, επιδεινώνει τα δυναμικά χαρακτηριστικά του μηχανισμού (μειώνει τη φυσική του συχνότητα). Η μείωση της ακτίνας του κυλίνδρου αυξάνει τις διαστάσεις του έκκεντρου και τη μάζα του. η ταχύτητα του κυλίνδρου αυξάνεται, η αντοχή του μειώνεται.
Μηχανισμός κάμερας- πρόκειται για μηχανισμό με υψηλότερο κινηματικό ζεύγος, ο οποίος έχει την ικανότητα να παρέχει διακοπή της ζεύξης εξόδου και η δομή περιέχει τουλάχιστον έναν σύνδεσμο με επιφάνεια εργασίας μεταβλητής καμπυλότητας.
Οι μηχανισμοί έκκεντρου έχουν σχεδιαστεί για να μετατρέπουν την κίνηση του οδηγού συνδέσμου στον απαιτούμενο τύπο κίνησης του συνδέσμου εξόδου σύμφωνα με έναν δεδομένο νόμο.
Το διάγραμμα ενός τυπικού μηχανισμού έκκεντρου έχει μια δομή που περιέχει ένα ράφι και δύο κινούμενους συνδέσμους (εικ. 9.1). Ταυτόχρονα, σε έναν μηχανισμό έκκεντρου με δύο κινούμενους συνδέσμους, είναι δυνατό να εφαρμοστεί ο μετασχηματισμός των παραγόντων κίνησης και δύναμης σύμφωνα με το νόμο οποιασδήποτε πολυπλοκότητας.
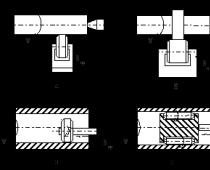
Ρύζι. 9.1. Κινηματικά διαγράμματα μηχανισμών έκκεντρου
Σε τυπικά διαγράμματα μηχανισμών έκκεντρου, ο σύνδεσμος μετάδοσης κίνησης ονομάζεται έκκεντρο και ο ωστήρας λειτουργεί ως σύνδεσμος εξόδου (Εικ. 9.1, αλλά)
ή rocker (Εικ. 9.1, β).
Το έκκεντρο είναι ένας σύνδεσμος του μηχανισμού έκκεντρου με επιφάνεια εργασίας μεταβλητής καμπυλότητας.
Ο ωστήρας είναι ο σύνδεσμος εξόδου του μηχανισμού έκκεντρου που εκτελεί μεταφορικές κινήσεις.
Ο βραχίονας παλινδρόμησης είναι ο σύνδεσμος εξόδου του μηχανισμού έκκεντρου, ο οποίος εκτελεί μόνο περιστροφικές κινήσεις και δεν έχει τη δυνατότητα να περιστρέφεται σε γωνία μεγαλύτερη από 360 °.
Στους μηχανισμούς έκκεντρου, ο μετασχηματισμός των παραγόντων κίνησης και δύναμης πραγματοποιείται με άμεση επαφή της επιφάνειας εργασίας του έκκεντρου με την επιφάνεια του συνδέσμου εξόδου. Σε αυτή την περίπτωση, λόγω της διαφοράς στις ταχύτητες κίνησης των συνδέσμων επαφής στη ζώνη επαφής τους, λαμβάνει χώρα τριβή ολίσθησης, η οποία οδηγεί σε εντατική φθορά αυτών των επιφανειών, καθώς και σε αύξηση των απωλειών, μείωση την απόδοση και τη διάρκεια ζωής του μηχανισμού έκκεντρου. Για να αντικατασταθεί η τριβή ολίσθησης με τριβή κύλισης στο υψηλότερο κινηματικό ζεύγος, εισάγεται ένας πρόσθετος σύνδεσμος στο κύκλωμα μηχανισμού έκκεντρου, ο οποίος ονομάζεται κύλινδρος. Ο κύλινδρος σχηματίζει ένα κινηματικό ζεύγος 5ης κατηγορίας με μία κίνηση με τον σύνδεσμο εξόδου (Εικ. 9.2). Η κινητικότητα αυτού
9. ΜΗΧΑΝΙΣΜΟΙ ΕΚΚΕΝΤΡΟ
Το κινηματικό ζεύγος δεν επηρεάζει τη λειτουργία μεταφοράς του μηχανισμού έκκεντρου και είναι τοπική κινητικότητα.
Ρύζι. 9.2. Κινηματικά διαγράμματα μηχανισμών έκκεντρου με ρολό
Όταν ένας πρόσθετος σύνδεσμος εισάγεται στο κύκλωμα - ένας κύλινδρος - ο μετασχηματισμός των παραγόντων κίνησης και δύναμης πραγματοποιείται μέσω επαφής της επιφάνειας εργασίας του έκκεντρου με την επιφάνεια του κυλίνδρου, ο οποίος αλληλεπιδρά με τον σύνδεσμο εξόδου. Σε αυτή την περίπτωση, το έκκεντρο έχει δύο τύπους προφίλ (εικ. 9.3): εποικοδομητικό και θεωρητικό.
Ρύζι. 9.3. Τύποι προφίλ έκκεντρου σε μηχανισμούς έκκεντρου
Το δομικό προφίλ (εργασίας) είναι το εξωτερικό προφίλ του έκκεντρου. Το θεωρητικό (κεντρικό) προφίλ είναι ένα προφίλ που περιγράφει
Δεν υπάρχει κέντρο του κυλίνδρου όταν κυλάει χωρίς να ολισθαίνει κατά μήκος του δομικού προφίλ του έκκεντρου.
9.1. ΤΑΞΙΝΟΜΗΣΗ ΜΗΧΑΝΙΣΜΩΝ ΕΚΚΕΝΤΡΟ
Οι μηχανισμοί έκκεντρου ταξινομούνται: 1) ανάλογα με τον επίσημο σκοπό τους:
μηχανισμοί έκκεντρου που διασφαλίζουν την κίνηση της ζεύξης εξόδου σύμφωνα με έναν δεδομένο νόμο κίνησης.
Θεωρία μηχανισμών και μηχανών. Proc. επίδομα |

9. ΜΗΧΑΝΙΣΜΟΙ ΕΚΚΕΝΤΡΟ
9.1.
μηχανισμοί έκκεντρου που παρέχουν μόνο την καθορισμένη μέγιστη μετατόπιση του συνδέσμου εξόδου (κύλιση της ώθησης ή γωνία αιώρησης του βραχίονα στροφέα).
2) ανάλογα με τη θέση των συνδέσμων στο διάστημα: επίπεδοι μηχανισμοί έκκεντρου (ρύζι. 9.1, εικ. 9.2);
μηχανισμοί χωρικών έκκεντρων (εικ. 9.4).
Ρύζι. 9.4. Σχέδια μηχανισμών χωρικών έκκεντρων
3) ανάλογα με τον τύπο της κίνησης του έκκεντρου:
μηχανισμοί έκκεντρου με περιστροφική κίνηση του έκκεντρου (εικ. 9.2). μηχανισμοί έκκεντρου με μεταφορική κίνηση του έκκεντρου (Εικ. 9.5). μηχανισμοί έκκεντρου με ελικοειδή κίνηση έκκεντρου.
Ρύζι. 9.5. Σχέδια μηχανισμών έκκεντρου με μεταφορική κίνηση του έκκεντρου
4) ανάλογα με τον τύπο κίνησης του συνδέσμου εξόδου:
μηχανισμοί έκκεντρου με μεταφορική κίνηση της εξόδου
σύνδεσμος (Εικ. 9.1, αλλά, Εικ. 9.2, αλλά, Εικ. 9.4, αλλά, Εικ. 9.5, αλλά);
μηχανισμοί έκκεντρου με περιστροφική κίνηση του συνδέσμου εξόδου
(Εικ. 9.1, β, Εικ. 9.2, β, Εικ. 9.4, β, Εικ. 9.5, β);
5) με την παρουσία ενός βίντεο στο σχέδιο:
μηχανισμοί έκκεντρου με ρολό (εικ. 9.2, εικ. 9.4, εικ. 9.5). μηχανισμοί έκκεντρου c χωρίς κύλινδρο (εικ. 9.1);
6) ανά τύπο έκκεντρου:
μηχανισμοί έκκεντρου με επίπεδο έκκεντρο (εικ. 9.1, εικ. 9.2, εικ.
9.5 );
μηχανισμοί έκκεντρου με κυλινδρικό έκκεντρο (εικ. 9.4). μηχανισμοί έκκεντρου με σφαιροειδές έκκεντρο (Εικ. 9.6, αλλά). μηχανισμοί έκκεντρου με σφαιρικό έκκεντρο (Εικ. 9.6, β).
Θεωρία μηχανισμών και μηχανών. Proc. επίδομα |

9. ΜΗΧΑΝΙΣΜΟΙ ΕΚΚΕΝΤΡΟ
9.1. Ταξινόμηση μηχανισμών έκκεντρου
Ρύζι. 9.6. Σχέδια μηχανισμών έκκεντρου με σφαιροειδή και σφαιρικά έκκεντρα
Ρύζι. 9.7. Διαγράμματα μηχανισμών αποαξονικού έκκεντρου
7) σύμφωνα με το σχήμα της επιφάνειας εργασίας του συνδέσμου εξόδου:
μηχανισμοί έκκεντρου με μυτερή επιφάνεια εργασίας
σύνδεσμος ποδιών (Εικ. 9.1, α, Εικ. 9.7, β, Εικ. 9.8, β).
μηχανισμοί έκκεντρου με επίπεδη επιφάνεια εργασίας του συνδέσμου εξόδου (Εικ. 9.7, αλλά, Εικ. 9.8, αλλά).
μηχανισμοί έκκεντρου με κυλινδρική επιφάνεια εργασίας του συνδέσμου εξόδου (εικ. 9.2).
μηχανισμοί έκκεντρου με σφαιρική επιφάνεια εργασίας του συνδέσμου εξόδου (Εικ. 9.7, c, d, Σχ. 9.8, c, d).
8) από την παρουσία μετατόπισης:
μηχανισμοί απαξονικού έκκεντρου (εικ. 9.7). μηχανισμοί αξονικού έκκεντρου (εικ. 9.8).
Θεωρία μηχανισμών και μηχανών. Proc. επίδομα |

9. ΜΗΧΑΝΙΣΜΟΙ ΕΚΚΕΝΤΡΟ
9.1. Ταξινόμηση μηχανισμών έκκεντρου
Ρύζι. 9.8. Διαγράμματα μηχανισμών αξονικού έκκεντρου
Μηχανισμός απαξονικού έκκεντρου είναι ένας μηχανισμός έκκεντρου, στον οποίο
ο άξονας της διαδρομής του συνδέσμου εξόδου μετατοπίζεται σε σχέση με το κέντρο περιστροφής του έκκεντρου κατά ένα ορισμένο ποσό (Εικ. 9.7). Το μέγεθος της μετατόπισης ονομάζεται εκκεντρότητα ή απαξονική και συμβολίζεται με e.
Μηχανισμός αξονικού έκκεντρου- αυτός είναι ένας μηχανισμός έκκεντρου στον οποίο ο άξονας της διαδρομής του συνδέσμου εξόδου διέρχεται από το κέντρο περιστροφής του έκκεντρου (εικ. 9.8).
9.2. ΜΕΘΟΔΟΙ ΓΙΑ ΤΟ ΚΛΕΙΣΙΜΟ ΣΤΟΙΧΕΙΩΝ ΤΟΥ ΥΨΗΛΟΤΕΡΟΥ ΚΙΝΗΜΑΤΙΚΟΥ ΖΕΥΓΟΥΡΟΥ
ΣΕ κατά την κίνηση των μηχανισμών έκκεντρου, είναι δυνατή μια κατάσταση που οδηγεί σε απώλεια επαφής των κινούμενων συνδέσμων, γεγονός που οδηγεί στο άνοιγμα των στοιχείων του υψηλότερου κινηματικού ζεύγους. Το άνοιγμα των στοιχείων του υψηλότερου κινηματικού ζεύγους οδηγεί στον τερματισμό της ύπαρξής του, κάτι που αντανακλάται στον νόμο κίνησης των συνδέσμων με τη μορφή σπασίματος και είναι απαράδεκτο για την κανονική λειτουργία των μηχανισμών έκκεντρου. Για να εξασφαλιστεί η σταθερότητα της επαφής των συνδέσμων που σχηματίζουν το υψηλότερο κινηματικό ζεύγος, χρησιμοποιούνται οι ακόλουθες μέθοδοι κλεισίματος στους μηχανισμούς έκκεντρου:
Κύκλωμα ισχύος- αυτός είναι ένας τρόπος για να εξασφαλιστεί η σταθερότητα της επαφής των συνδέσμων του υψηλότερου κινηματικού ζεύγους χρησιμοποιώντας τις δυνάμεις βαρύτητας των συνδέσμων ή τις ελαστικές δυνάμεις των ελατηρίων (Εικ. 9.9).
ΣΕ Σε μηχανισμούς έκκεντρου με κλείσιμο ισχύος των συνδέσμων που σχηματίζουν το υψηλότερο ζεύγος, η κίνηση του συνδέσμου εξόδου στη φάση αφαίρεσης πραγματοποιείται λόγω της δράσης της επιφάνειας επαφής του έκκεντρου στην επιφάνεια επαφής του συνδέσμου εξόδου, δηλαδή του έκκεντρου είναι ο κύριος σύνδεσμος και ο σύνδεσμος εξόδου είναι ο κινητήριος σύνδεσμος: ώθηση ή παλινδρόμηση. Στη φάση προσέγγισης, ο σύνδεσμος εξόδου κινείται λόγω της δράσης της ελαστικής δύναμης του ελατηρίου ή της δύναμης βαρύτητας του συνδέσμου εξόδου, δηλαδή ο προπορευόμενος σύνδεσμος είναι ο σύνδεσμος εξόδου: ωθητής ή παλινδρόμηση, και ο οδηγούμενος σύνδεσμος είναι το έκκεντρο.
Θεωρία μηχανισμών και μηχανών. Proc. επίδομα |

9. ΜΗΧΑΝΙΣΜΟΙ ΕΚΚΕΝΤΡΟ
9.2. Μέθοδοι κλεισίματος στοιχείων υψηλότερου κινηματικού ζεύγους
Ρύζι. 9.9. Σχέδια μηχανισμών έκκεντρου με δυναμικό κλείσιμο
Γεωμετρικό κλείσιμο- αυτός είναι ένας τρόπος για να εξασφαλιστεί η σταθερότητα της επαφής των συνδέσμων του υψηλότερου κινηματικού ζεύγους μέσω της διαμόρφωσης των επιφανειών εργασίας του έκκεντρου (Εικ. 9.10).
Ρύζι. 9.10. Διαγράμματα μηχανισμών θετικού έκκεντρου
Σε μηχανισμούς έκκεντρου με γεωμετρικό κλείδωμα των συνδέσμων που σχηματίζουν το υψηλότερο ζεύγος, η κίνηση του συνδέσμου εξόδου στη φάση αφαίρεσης πραγματοποιείται λόγω της πρόσκρουσης της εξωτερικής επιφάνειας εργασίας του έκκεντρου στην επιφάνεια επαφής του συνδέσμου εξόδου. Η κίνηση του συνδέσμου εξόδου στη φάση προσέγγισης είναι συνέπεια της πρόσκρουσης της εσωτερικής επιφάνειας εργασίας του έκκεντρου στην επιφάνεια επαφής του συνδέσμου εξόδου. Και στις δύο φάσεις, το έκκεντρο λειτουργεί ως ο οδηγός σύνδεσμος και ο σύνδεσμος εξόδου είναι ο κινητήριος σύνδεσμος: ωθητής ή λικνίσκος.
Θεωρία μηχανισμών και μηχανών. Proc. επίδομα |
![]()
9. ΜΗΧΑΝΙΣΜΟΙ ΕΚΚΕΝΤΡΟ
9.3. ΚΥΡΙΕΣ ΠΑΡΑΜΕΤΡΟΙ ΤΟΥ ΜΗΧΑΝΙΣΜΟΥ ΕΚΚΕΝΤΡΟ
Οι μηχανισμοί έκκεντρου που σχηματίζονται με βάση τυπικά σχήματα ανήκουν σε κυκλοειδείς μηχανισμούς με περίοδο λειτουργίας ίση με 2π και χαρακτηρίζονται από την παρουσία πολλών φάσεων κίνησης του συνδέσμου εξόδου (Εικ. 9.11):
η φάση αφαίρεσης είναι η φάση κίνησης των εκκεντροφόρων συνδέσμων μετακινώντας τον σύνδεσμο εξόδου από την κάτω θέση στην επάνω.
ανώτερη φάση ορθοστασίας ή ηρεμίας
οβάλ μηχανισμοί, συνοδευόμενοι από όρθιοι ή όρθιοισύνδεσμος εξόδου στην επάνω θέση.
φάση προσέγγισης - αυτή είναι η φάση της κίνησης των συνδέσμων των μηχανισμών έκκεντρου, που συνοδεύεται από την κίνηση του συνδέσμου εξόδου από την επάνω θέση στην κάτω.
χαμηλότερη φάση ορθοστασίας ή ηρεμίαςείναι η φάση κίνησης των έκκεντρων συνδέσμων
οβάλ μηχανισμοί, συνοδευόμενοι από όρθιοι ή όρθιοισύνδεσμος εξόδου στην κάτω θέση.
ϕy |
ϕ γ.γ. |
ϕσ |
ϕ n.v |
|
ϕ r.x |
ϕ x.x |
|||
Ρύζι. 9.11. Φάσεις κίνησης του συνδέσμου εξόδου των μηχανισμών έκκεντρου |
||||
Κάθε φάση της κίνησης των συνδέσμων των μηχανισμών έκκεντρου χαρακτηρίζεται από τους αντίστοιχους δύο τύπους γωνιών (Εικ. 9.12):
Η γωνία φάσης ϕ είναι η γωνία περιστροφής του έκκεντρου κατά τη διάρκεια της δράσης μιας συγκεκριμένης φάσης της κίνησης του συνδέσμου εξόδου.
γωνία προφίλ δ είναι η γωνιακή συντεταγμένη του σημείου λειτουργίας του θεωρητικού προφίλ έκκεντρου που αντιστοιχεί στην τρέχουσα γωνία φάσης.
Σύμφωνα με την ταξινόμηση των φάσεων, οι γωνίες φάσης χωρίζονται σε τέσσερις τύπους (εικ. 9.11):
γωνία φάσης αφαίρεσης ϕ y (Εικ. 9.12); γωνία φάσης της άνω όρθιας ή όρθιας ϕ in. in (Εικ. 9.12).
Θεωρία μηχανισμών και μηχανών. Proc. επίδομα |

9. ΜΗΧΑΝΙΣΜΟΙ ΕΚΚΕΝΤΡΟ
9.3. Οι κύριες παράμετροι του μηχανισμού έκκεντρου
γωνία φάσης προσέγγισης φ με (Εικ. 9.12); γωνία φάσης της κατώτερης στάσης ή όρθιας ϕ n.v (Εικ. 9.12).
Ρύζι. 9.12. Γωνίες φάσης και προφίλ μηχανισμών έκκεντρου
Το άθροισμα και των τεσσάρων γωνιών φάσης σχηματίζει τη γωνία κυκλικής φάσης:
ϕ = ϕου + ϕv.v + ϕσ + ϕν.v = 2 π.
Το άθροισμα των τριών πρώτων γωνιών φάσης είναι η γωνία φάσης της διαδρομής εργασίας του μηχανισμού έκκεντρου (Εικ. 9.11):
ϕ r.x = ϕ y + ϕ v.v + ϕ s.
Η γωνία φάσης ρελαντί του μηχανισμού έκκεντρου είναι ίση με τη γωνία φάσης του κάτω περιβλήματος (Εικ. 9.11), δηλ.
ϕ x.x = ϕ n.v.
Κάθε φάση της κίνησης των συνδέσμων των μηχανισμών έκκεντρου έχει τη δική της γωνία προφίλ, οι γωνίες χωρίζονται επίσης σε τέσσερις τύπους (εικ. 9.12):
γωνία αφαίρεσης δ y ; η γωνία του άνω στέκεται ή στέκεται δ in. γωνία προσέγγισης δ με ;
γωνία κατώτερης ορθοστασίας ή ορθοστασίας δ n.v.
Στη γενική περίπτωση, οι γωνίες φάσης και προφίλ των αντίστοιχων φάσεων κίνησης των συνδέσμων τυπικών μηχανισμών έκκεντρου δεν είναι ίσες μεταξύ τους:
ϕ ≠ δ.
Η ισότητα των γωνιών φάσης και προφίλ των αντίστοιχων φάσεων της κίνησης των συνδέσμων είναι χαρακτηριστική μόνο στη φάση της κατώτερης στάθμης (Εικ. 9.12) και για τις υπόλοιπες φάσεις της κίνησης των συνδέσμων, λαμβάνει χώρα μόνο για τυπικούς μηχανισμούς έκκεντρου χωρίς ρολό.
Θεωρία μηχανισμών και μηχανών. Proc. επίδομα |

9. ΜΗΧΑΝΙΣΜΟΙ ΕΚΚΕΝΤΡΟ
9.4. ΔΟΜΙΚΗ ΑΝΑΛΥΣΗ ΜΗΧΑΝΙΣΜΩΝ ΕΠΙΠΕΔΩΝ ΕΚΚΕΝΤΡΟ
Οι σύνδεσμοι των τυπικών μηχανισμών έκκεντρου κινούνται σε παράλληλα επίπεδα, επομένως, αυτοί οι μηχανισμοί είναι επίπεδοι, η κινητικότητα των οποίων υπολογίζεται από τον τύπο Chebyshev.
Μηχανισμοί έκκεντρου χωρίς ρολό (Εικ. 9.1 ). Η δομή και των δύο τύπων ti-
Οι νέοι μηχανισμοί έκκεντρου αποτελούνται από τρεις συνδέσμους, από τους οποίους το έκκεντρο 1 και ο βραχίονας ώθησης ή ο βραχίονας ώθησης 2 είναι κινητοί σύνδεσμοι, και το ράφι 0 είναι ένας σταθερός σύνδεσμος, επομένως, n = 2. Το ράφι αναπαρίσταται στο σχήμα του μηχανισμού με έναν ωστήρα με ένα αρθρωτό στήριγμα και ένα σταθερό ολισθητήρα και στο σχήμα μηχανισμών με βραχίονα - δύο αρθρωτά σταθερά στηρίγματα. Οι κινούμενοι σύνδεσμοι και το ράφι σχηματίζουν δύο περιστροφικά κινηματικά ζεύγη με κινητικότητα ίση με ένα: 0 - 1, 2 - 0 και μια υψηλότερη κινηματική κινητικότητα πανιών ίση με δύο: 1 - 2, επομένως, p 1 = 2, p 2 = 1 .
W = 3 2 - 2 2 - 1 = 6 - 4 - 1 = 1.
Το αποτέλεσμα σημαίνει ότι μια γενικευμένη συντεταγμένη είναι αρκετή για να προσδιορίσει με σαφήνεια τη σχετική θέση των συνδέσμων μηχανισμών αυτού του τύπου.
Μηχανισμοί έκκεντρου με ρολό (Εικ. 9.2 ). Τα σχήματα και των δύο μηχανισμών έκκεντρου αποτελούνται από τέσσερις συνδέσμους, από τους οποίους το έκκεντρο 1, ο ωστήρας ή ο κύλινδρος 2 και ο κύλινδρος 3 είναι κινητοί σύνδεσμοι, και το ράφι 0 είναι ένας σταθερός σύνδεσμος, επομένως, n = 3. Το ράφι παρουσιάζεται στο σχήμα του μηχανισμού με ωστήρα του ενόςαρθρωτά-σταθεράστήριγμα και ένα σταθερό ρυθμιστικό, και στο σχήμα μηχανισμών με βραχίονα - δύοαρθρωτά-σταθεράυποστηρίζει. Οι κινούμενοι σύνδεσμοι και το ράφι σχηματίζουν τρία περιστροφικά κινηματικά ζεύγη με κινητικότητα ίση με ένα: 0 - 1, 2 - 3, 3 - 0 και ένα υψηλότερο κινηματικό ζεύγος με κινητικότητα ίση με δύο: 1 - 3, επομένως, p1 = 2, p2 = 1.
Αντικαθιστώντας τα ληφθέντα δεδομένα στον δομικό τύπο, λαμβάνουμε
W = 3 3 - 2 3 - 1 = 9 - 6 - 1 = 2 .
Ο υπολογισμός σύμφωνα με τον τύπο Chebyshev για τυπικούς μηχανισμούς έκκεντρου με ρολό δείχνει ότι η κινητικότητα είναι ίση με δύο. Το αποτέλεσμα υποδεικνύει την παρουσία δομικών ελαττωμάτων στα σχήματα των τυπικών μηχανισμών έκκεντρου με έναν κύλινδρο, γεγονός που υποδεικνύει την παρουσία δύο τύπων κινητικότητας για διαφορετικούς λειτουργικούς σκοπούς. Η κινητικότητα ενός τυπικού επίπεδου μηχανισμού έκκεντρου με έναν σύνδεσμο κίνησης, που σχηματίζει έναν πρωτεύοντα μηχανισμό με κινητικότητα ίση με ένα, είναι ίση με ένα, επομένως, η δεύτερη μονάδα κινητικότητας υπολογίζεται από την τοπική κινητικότητα που σχηματίζεται από τον κύλινδρο με την έξοδο Σύνδεσμος:
W = 2 =W 0 +W ì =1 +1,
όπου W 0 , W m - αντίστοιχα, η κύρια (υπολογισμένη) και η τοπική κινητικότητα του μηχανισμού έκκεντρου.
Θεωρία μηχανισμών και μηχανών. Proc. επίδομα |

9. ΜΗΧΑΝΙΣΜΟΙ ΕΚΚΕΝΤΡΟ
9.5. ΚΙΝΗΜΑΤΙΚΗ ΑΝΑΛΥΣΗ ΜΗΧΑΝΙΣΜΩΝ ΕΠΙΠΕΔΩΝ ΕΚΚΕΝΤΡΟ
Για να πραγματοποιηθεί μια κινηματική ανάλυση τυπικών μηχανισμών έκκεντρου, είναι απαραίτητο να γνωρίζουμε τις κύριες διαστάσεις όλων των συνδέσμων του ή τον νόμο της κίνησης του συνδέσμου εξόδου.
Στη γενική περίπτωση, ο σκοπός της κινηματικής ανάλυσης τυπικών μηχανισμών έκκεντρου με ένα δεδομένο σχήμα μηχανισμού είναι να προσδιοριστεί ο νόμος κίνησης της ζεύξης εξόδου και με γνωστές βασικές διαστάσεις όλων των ζεύξεων, να προσδιοριστεί ο νόμος κίνησης της εξόδου Σύνδεσμος.
Ο νόμος της κίνησης του συνδέσμου εξόδου καθορίζεται ως συνάρτηση της γωνίας περιστροφής του έκκεντρου με βάση τα δομικά χαρακτηριστικά του μηχανισμού έκκεντρου και τις καθορισμένες παραμέτρους:
S = f(ϕ),
όπου ϕ είναι η γωνία περιστροφής του έκκεντρου.
Αυτή η λειτουργική εξάρτηση μπορεί να ληφθεί με μια αναλυτική ή γραφική-αναλυτική μέθοδο. Η αναλυτική μέθοδος, όπως και στην ανάλυση μηχανισμών άλλων τύπων, επιτρέπει τη λήψη πιο ακριβών δεδομένων, ωστόσο, η γραφική-αναλυτική μέθοδος είναι απλούστερη και δίνει ένα σαφές αποτέλεσμα, γεγονός που οδήγησε στην ευρεία χρήση της στους υπολογισμούς μηχανικής για να αποκτηθεί μια πρωταρχική ιδέα τις τιμές και τα μοτίβα αλλαγής στις κινηματικές παραμέτρους των μηχανισμών έκκεντρου με βάση δεδομένες συνθήκες.
Γραφική-αναλυτική μέθοδοςΗ κινηματική ανάλυση μπορεί να πραγματοποιηθεί με δύο μεθόδους: τη μέθοδο των κινηματικών διαγραμμάτων ή τη μέθοδο των κινηματικών σχεδίων. Η μέθοδος των σχεδίων όπως εφαρμόζεται στην ανάλυση τυπικών μηχανισμών έκκεντρου βασίζεται στη χρήση μηχανισμών αντικατάστασης.
Μηχανισμός αντικατάστασης- αυτός είναι ένας μηχανισμός, η δομή του οποίου περιέχει μόνο χαμηλότερα κινηματικά ζεύγη, τα οποία, σε ορισμένες θέσεις του προπορευόμενου κρίκου, έχουν τις ίδιες μετατοπίσεις, ταχύτητες και επιταχύνσεις για τον σύνδεσμο εξόδου με τον αντίστοιχο μηχανισμό με το υψηλότερο ζεύγος.
Κατά την επιλογή ενός σχεδίου μηχανισμού αντικατάστασης, η κύρια προσοχή δίνεται στη διατήρηση των νόμων κίνησης των συνδέσμων οδήγησης και εξόδου των μηχανισμών έκκεντρου και στην αμοιβαία διάταξη των αξόνων αυτών των συνδέσμων. Κάθε υψηλότερο κινηματικό ζεύγος αντικαθίσταται από δύο χαμηλότερα ζεύγη, γεγονός που οδηγεί στην εμφάνιση ενός πλασματικού συνδέσμου 3 στη δομή του μηχανισμού αντικατάστασης. Με βάση τα παραπάνω, λαμβάνοντας υπόψη τον τύπο κίνησης που εκτελείται από τον σύνδεσμο εξόδου, οι μηχανισμοί έκκεντρου τα διαγράμματα αντικαθίστανται με το αντίστοιχο διάγραμμα ενός τυπικού μηχανισμού μοχλού.
Η κινηματική ανάλυση των τυπικών μηχανισμών μοχλού έχει συζητηθεί παραπάνω (βλ. Κεφάλαιο 2).
Στις περισσότερες περιπτώσεις, ο νόμος της κίνησης της ζεύξης εξόδου ενός τυπικού μηχανισμού έκκεντρου δίνεται μέσω της δεύτερης παραγώγου της διαδρομής ως προς τη γωνία περιστροφής ή ως προς το χρόνο (φόρος επιτάχυνσης). Σε αυτή την περίπτωση, για να ληφθεί άμεσα ο νόμος της κίνησης του συνδέσμου εξόδου, χρησιμοποιείται η μέθοδος των κινηματικών διαγραμμάτων (Εικ. 9.13).
Θεωρία μηχανισμών και μηχανών. Proc. επίδομα |

9. ΜΗΧΑΝΙΣΜΟΙ ΕΚΚΕΝΤΡΟ
9.5. Κινηματική ανάλυση μηχανισμών επίπεδων έκκεντρων
δ 2 Σ |
F(ϕ) |
||||
dϕ 2 |
|||||
dϕ 2 |
|||||
F(ϕ) |
|||||
S = f(ϕ)
2 π ϕ
Ρύζι. 9.13. Κινηματική ανάλυση μηχανισμών έκκεντρου με τη μέθοδο των διαγραμμάτων
Η διαδικασία προσδιορισμού του νόμου της κίνησης πραγματοποιείται με την ακόλουθη σειρά.
Πρώτον, με βάση τις δεδομένες συνθήκες, ένα διάγραμμα του αναλόγου του
ενσωματώνοντας το διάγραμμα του αναλόγου επιτάχυνσης, σχηματίστε πρώτα το διάγραμμα
mu αναλογική ταχύτητα |
(ϕ) (Εικ. 9.14, β), στη συνέχεια, χρησιμοποιώντας το γραφικό |
|||
ενσωμάτωση διαγράμματος |
αναλογική ταχύτητα, λάβετε ένα διάγραμμα διαδρομής |
|||
s \u003d f (ϕ) (Εικ. 9.13, γ). |
||||
Η κινηματική ανάλυση επιτρέπει τη λήψη των απαραίτητων δεδομένων για τη μετάβαση στο στάδιο της μετρικής σύνθεσης μηχανισμών έκκεντρου.
9.6. ΣΥΝΘΕΣΗ ΜΗΧΑΝΙΣΜΩΝ ΕΠΙΠΕΔΩΝ ΕΚΚΕΝΤΡΟ
Τα κύρια κριτήρια που καθοδηγούνται στην επίλυση των προβλημάτων σύνθεσης των μηχανισμών έκκεντρου είναι: η ελαχιστοποίηση των συνολικών και μάζας χαρακτηριστικών και των τιμών των γωνιών πίεσης, καθώς και η εξασφάλιση της δυνατότητας κατασκευής του δομικού προφίλ του έκκεντρου.
Η σύνθεση οποιουδήποτε μηχανισμού έκκεντρου πραγματοποιείται σε δύο στάδια: δομική σύνθεση και μετρική σύνθεση.
Στο στάδιο της δομικής σύνθεσης, πραγματοποιείται ο σχηματισμός ενός δομικού διαγράμματος του μηχανισμού έκκεντρου, δηλ. τεκμηριώνεται ο αριθμός των συνδέσμων
Θεωρία μηχανισμών και μηχανών. Proc. επίδομα |

9. ΜΗΧΑΝΙΣΜΟΙ ΕΚΚΕΝΤΡΟ
9.6. Σύνθεση μηχανισμών επίπεδων έκκεντρων
συνδέσεις κινητής τηλεφωνίας και τύποι κίνησης που εκτελούνται από αυτούς· αριθμός και τύπος στοιχείων ραφιών. αριθμός, κατηγορία και κινητικότητα κινηματικών ζευγών, αριθμός και τύπος κινηματικών αλυσίδων. Επιπλέον, τεκμηριώνεται η εισαγωγή κάθε περίσσειας σύνδεσης και τοπικής κινητικότητας στη δομή του μηχανισμού έκκεντρου. Οι καθοριστικές συνθήκες κατά την επιλογή ενός μπλοκ διαγράμματος είναι: οι δεδομένοι νόμοι μετασχηματισμού της κίνησης των συνδέσμων εισόδου και εξόδου και η σχετική θέση των αξόνων αυτών των ζεύξεων. Εάν οι άξονες των συνδέσμων εισόδου και εξόδου είναι παράλληλοι, τότε επιλέγεται ένα επίπεδο σχήμα του μηχανισμού. Με άξονες τομής ή διέλευσης, πρέπει να χρησιμοποιείται χωροταξικό σχήμα. Σε μηχανισμούς έκκεντρου που λειτουργούν υπό την επίδραση μικρών παραγόντων δύναμης, χρησιμοποιείται σύνδεσμος εξόδου με αιχμηρή επιφάνεια εργασίας. Σε μηχανισμούς έκκεντρου που λειτουργούν υπό τη δράση μεγάλων παραγόντων δύναμης, προκειμένου να αυξηθεί η αντοχή και να μειωθεί η φθορά, εισάγεται ένας κύλινδρος στη δομή ή αυξάνεται η μειωμένη ακτίνα καμπυλότητας των επιφανειών επαφής των συνδέσμων.
Στο στάδιο της μετρικής σύνθεσης, καθορίζονται οι κύριες διαστάσεις των συνδέσμων του μηχανισμού έκκεντρου και η διαμόρφωση των επιφανειών εργασίας των προφίλ έκκεντρου, γεγονός που εξασφαλίζει την εφαρμογή των καθορισμένων νόμων κίνησης και της συνάρτησης μεταφοράς ή τη μέγιστη μετατόπιση του τον σύνδεσμο εξόδου.
9.7. ΝΟΜΟΙ ΚΙΝΗΣΗΣ ΤΟΥ ΣΥΝΔΕΣΟΥ ΕΞΟΔΟΥ
Εάν ο νόμος της κίνησης του συνδέσμου εξόδου δεν προσδιορίζεται στους όρους αναφοράς για τη μετρική σύνθεση του μηχανισμού έκκεντρου, τότε πρέπει να επιλεγεί ανεξάρτητα από ένα σύνολο τυπικών νόμων κίνησης, οι οποίοι χωρίζονται σε τρεις ομάδες:
άτονοι νόμοι (Εικ. 9.14). νόμοι με δυνατά χτυπήματα (Εικ. 9.15). νόμοι με ήπιες επιπτώσεις (Εικ. 9.16).
Οι κύριοι εκπρόσωποι των νόμων κίνησης χωρίς κραδασμούς των συνδέσμων εξόδου είναι: ημιτονοειδής (Εικ. 9.14, α) και τραπεζοειδής νόμοι κίνησης (Εικ. 9.14, β). Και οι δύο νόμοι εξασφαλίζουν την ομαλή λειτουργία του μηχανισμού, ωστόσο, έχουν ένα σημαντικό μειονέκτημα, το οποίο εκφράζεται σε μια αργή αύξηση της μετατόπισης του συνδέσμου εξόδου, που συνοδεύεται από μεγάλες τιμές επιτάχυνσης.
Θεωρία μηχανισμών και μηχανών. Proc. επίδομα |

9. ΜΗΧΑΝΙΣΜΟΙ ΕΚΚΕΝΤΡΟ
dϕ 2 |
|
δ 2 Σ |
|
dϕ 2 |
|
Ρύζι. 9.14. Άτονοι νόμοι κίνησης του συνδέσμου εξόδου του μηχανισμού έκκεντρου
Οι άτονοι νόμοι κίνησης των ζεύξεων εξόδου είναι προτιμότεροι από την άποψη της αντίληψης των παραγόντων δύναμης από τους συνδέσμους των μηχανισμών έκκεντρου. Τα έκκεντρα, που εφαρμόζονται σύμφωνα με τους νόμους κίνησης χωρίς κραδασμούς, έχουν δομικά προφίλ πιο σύνθετης διαμόρφωσης, η κατασκευή των οποίων είναι τεχνολογικά δύσκολη, καθώς απαιτεί τη χρήση εξοπλισμού υψηλής ακρίβειας, επομένως η κατασκευή τους είναι πολύ πιο ακριβή. Οι μηχανισμοί έκκεντρου με νόμους χωρίς κραδασμούς των ζεύξεων εξόδου θα πρέπει να χρησιμοποιούνται σε υψηλές ταχύτητες και αυστηρές απαιτήσεις για ακρίβεια και ανθεκτικότητα.
dϕ 2 |
||||
δ 2 Σ |
|
dϕ 2 |
|
Ρύζι. 9.15. Νόμοι κίνησης του συνδέσμου εξόδου του εκκεντροφόρου μηχανισμού με σκληρές κρούσεις
Θεωρία μηχανισμών και μηχανών. Proc. επίδομα |

9. ΜΗΧΑΝΙΣΜΟΙ ΕΚΚΕΝΤΡΟ |
|||
9.7. Νόμοι κίνησης του συνδέσμου εξόδου |
|||
dϕ 2 |
dϕ 2 |
||
δ 2 Σ |
δ 2 Σ |
||
dϕ 2 |
dϕ 2 |
||
Ρύζι. 9.16. Νόμοι κίνησης του συνδέσμου εξόδου του μηχανισμού έκκεντρου |
|||
με απαλές πινελιές |
|||
Οι κύριοι εκπρόσωποι των νόμων κίνησης των ζεύξεων εξόδου με σκληρές κρούσεις είναι: γραμμικοί (Εικ. 9.15, α) και γραμμικοί με μεταβατικές καμπύλες (Εικ. 9.15, β). Οι νόμοι με σκληρές κρούσεις χαρακτηρίζονται από την παρουσία στην αρχή και στο τέλος των φάσεων αφαίρεσης και προσέγγισης σημείων που έχουν τιμές επιτάχυνσης θεωρητικά ίσες με το άπειρο, γεγονός που προκαλεί την εμφάνιση δυνάμεων αδράνειας στη ζώνη επαφής των συνδέσμων του μηχανισμού έκκεντρου , επίσης ίσο με το άπειρο. Αυτό το φαινόμενο υποδεικνύει την εμφάνιση σύγκρουσης των επιφανειών εργασίας των συνδέσμων επαφής. Οι νόμοι για σκληρές κρούσεις έχουν περιορισμένη εφαρμογή και χρησιμοποιούνται σε μη κρίσιμους μηχανισμούς που λειτουργούν σε χαμηλές ταχύτητες και χαμηλή αντοχή.
Για να διασφαλιστούν οι δείκτες ποιότητας του μηχανισμού έκκεντρου, προτιμώνται οι νόμοι κίνησης των συνδέσμων εξόδου με μαλακές κρούσεις. Παρόμοιοι νόμοι περιλαμβάνουν: ομοιόμορφα επιταχυνόμενο (Εικ. 9.16, α), συνημίτονο (Εικ. 9.16, β), γραμμικά φθίνουσα (Εικ. 9.16, γ) και γραμμική αύξηση (Εικ. 9.16, δ).
Οι νόμοι με μαλακές κρούσεις επιτρέπουν την παρουσία σύγκρουσης των επιφανειών εργασίας των συνδέσμων επαφής του μηχανισμού έκκεντρου, η οποία συμβαίνει όταν οι τιμές επιτάχυνσης των σημείων επαφής αλλάζουν στιγμιαία στο τελικό
Θεωρία μηχανισμών και μηχανών. Proc. επίδομα |

9. ΜΗΧΑΝΙΣΜΟΙ ΕΚΚΕΝΤΡΟ
9.7. Νόμοι κίνησης του συνδέσμου εξόδου
Μέγεθος. Τα μαλακά χτυπήματα είναι λιγότερο επικίνδυνα. Η εφαρμογή αυτών των νόμων πραγματοποιείται σε μηχανισμούς που λειτουργούν σε χαμηλές ταχύτητες με υψηλή αντοχή.
Στην πραγματικότητα, οι συνδυασμένοι νόμοι είναι πιο διαδεδομένοι, δηλ. νόμοι κίνησης που σχηματίζονται από συναρτήσεις του ίδιου τύπου ή συναρτήσεις διαφορετικών ομάδων.
9.8. ΠΡΟΣΔΙΟΡΙΣΜΟΣ ΤΗΣ ΑΚΤΙΝΑΣ ΤΟΥ ΑΡΧΙΚΟΥ ΠΕΡΙΓΡΑΦΟΥ ΕΚΚΕΝΤΡΟ
Οι συνολικές διαστάσεις του μηχανισμού έκκεντρου καθορίζονται από τις παραμέτρους του αρχικού περιγράμματος του έκκεντρου. Η θέση του κέντρου περιστροφής του έκκεντρου είναι ευθυγραμμισμένη με το γεωμετρικό κέντρο του αρχικού περιγράμματος και πρέπει να πληροί την ακόλουθη προϋπόθεση: η τρέχουσα τιμή της γωνίας πίεσης σε οποιοδήποτε σημείο του δομικού προφίλ του έκκεντρου δεν πρέπει να υπερβαίνει την επιτρεπόμενη τιμή . Εάν το έκκεντρο είναι επίπεδο και περιστρέφεται, τότε το αρχικό του περίγραμμα είναι κύκλος. Σε αυτή την περίπτωση, η διαδικασία αναζήτησης του αρχικού περιγράμματος περιορίζεται στον προσδιορισμό της ακτίνας του.
Στις περισσότερες περιπτώσεις, το έκκεντρο περιστρέφεται μόνο προς μία κατεύθυνση, ωστόσο, κατά την εκτέλεση επισκευών, είναι απαραίτητο να μπορείτε να αντιστρέψετε την κίνηση του έκκεντρου. Κατά την αλλαγή της κατεύθυνσης κίνησης, οι φάσεις αφαίρεσης και προσέγγισης αντιστρέφονται. Για να προσδιορίσετε την περιοχή των αποδεκτών λύσεων, δηλ. την περιοχή της πιθανής θέσης του κέντρου περιστροφής
έκκεντρο, κατασκευάζεται ένα διάγραμμα S = f d dS ϕ. Γραφικά, το εύρος των έγκυρων
Οι λύσεις καθορίζονται από μια οικογένεια εφαπτομένων που σχεδιάζονται στην προκύπτουσα καμπύλη σε γωνίες κλίσης με τις αντίστοιχες τιμές της επιτρεπόμενης γωνίας πίεσης (Εικ. 9.17, Εικ. 9.18).
Η επιλογή του κέντρου περιστροφής του έκκεντρου γίνεται μόνο εντός της περιοχής των εφικτών λύσεων. Σε αυτή την περίπτωση, πρέπει να διασφαλιστούν οι μικρότερες συνολικές διαστάσεις του μηχανισμού έκκεντρου. Η ελάχιστη ακτίνα του αρχικού περιγράμματος R min λαμβάνεται συνδέοντας την κορυφή της περιοχής των εφικτών λύσεων του σημείου Ο με την αρχή του συστήματος συντεταγμένων σημείο 0, δηλαδή R 0 = R min
(εικ. 9.17, εικ. 9.18).
Η ακτίνα του αρχικού περιγράμματος των μηχανισμών αξονικού έκκεντρου με ωστήρα, όταν οι γωνίες φάσης αφαίρεσης και προσέγγισης είναι ίσες (Εικ. 9.17, αλλά) αντιστοιχεί στην ελάχιστη ακτίνα, δηλαδή R 0 \u003d R min. Ο προσδιορισμός της ακτίνας του αρχικού περιγράμματος μηχανισμών αξονικού έκκεντρου με ωστήρα με ανισότητα γωνιών φάσης αφαίρεσης και προσέγγισης (Εικ. 9.17, β) πραγματοποιείται συνδέοντας την αρχή του συστήματος συντεταγμένων του σημείου 0 με το σημείο O 1 που βρίσκεται στην περιοχή των αποδεκτών λύσεων και που είναι το σημείο τομής του άξονα διαδρομής με μία από τις εφαπτομένες, δηλαδή R 0 = R 1 .
Θεωρία μηχανισμών και μηχανών. Proc. επίδομα |

9. ΜΗΧΑΝΙΣΜΟΙ ΕΚΚΕΝΤΡΟ
9.8.
Rmin |
|||||
Rmin |
|||||
Ρύζι. 9.17. Σχέδια για τον προσδιορισμό της ακτίνας του αρχικού περιγράμματος των μηχανισμών έκκεντρου με ωστήρα
Για τον προσδιορισμό της ακτίνας του αρχικού περιγράμματος των μηχανισμών απαξονικού έκκεντρου με έναν ωστήρα, είναι απαραίτητο να σχεδιάσετε δύο ευθείες γραμμές παράλληλες στον άξονα διαδρομής S, μετατοπισμένες σε σχέση με τον άξονα διαδρομής κατά ένα ποσό ανάλογο με την τιμή της εκκεντρότητας (Εικ. 9.17). . Στη διασταύρωση των εφαπτομένων, περιορίζοντας την περιοχή των εφικτών λύσεων, με αυτές τις ευθείες, βρίσκουμε τα σημεία O 2 και O 3 . Συνδέουμε τα σημεία O 2 και O 3 με το κέντρο της αρχής του συστήματος συντεταγμένων στο σημείο 0. Οι προκύπτουσες ακτίνες R 2 και R 3 θα είναι ελαφρώς μεγαλύτερες από την ελάχιστη ακτίνα του αρχικού περιγράμματος R min .
Για μηχανισμούς απαξονικού έκκεντρου με ωστήρα, εάν οι γωνίες φάσης αφαίρεσης και προσέγγισης είναι ίσες (Εικ. 9.17, α), οι ακτίνες R 2 και R 3 θα είναι ίσες σε μέγεθος. Στην περίπτωση αυτή, η ακτίνα που αντιστοιχεί στην καθορισμένη θέση της εκκεντρότητας (δεξιά ή αριστερά) λαμβάνεται ως η ακτίνα του αρχικού περιγράμματος. Για μηχανισμούς απαξονικού έκκεντρου με ώθηση, εάν οι γωνίες φάσης αφαίρεσης και προσέγγισης δεν είναι ίσες (Εικ. 9.17, β), οι ακτίνες R 2 και R 3 δεν θα είναι ίσες σε μέγεθος. Σε αυτή την περίπτωση, η ακτίνα που έχει μικρότερη τιμή λαμβάνεται ως η ακτίνα του αρχικού περιγράμματος. ΣΕ
συγκεκριμένα, R2 > R3, δηλ. R0 = R3.
Σε μηχανισμούς έκκεντρου με βραχίονα στροφέα για μια δεδομένη κεντρική απόσταση a w, βρίσκουμε τις θέσεις των σημείων O 4 και O 5 στη διασταύρωση ενός τόξου με ακτίνα R \u003d a w που προέρχεται από το σημείο E με εφαπτόμενες (Εικ. 9.18, ένα). Συνδέοντας τα σημεία O 4 και O 5 με το σημείο αρχής 0, παίρνουμε τις ακτίνες R 4 και R 5 . Η ακτίνα με τη μικρότερη τιμή λαμβάνεται ως η ακτίνα του αρχικού περιγράμματος. Ειδικότερα, R4 > R5, δηλ. R0 = R4.
Θεωρία μηχανισμών και μηχανών. Proc. επίδομα |
![]()
9. ΜΗΧΑΝΙΣΜΟΙ ΕΚΚΕΝΤΡΟ
9.8. Προσδιορισμός της ακτίνας του αρχικού περιγράμματος του έκκεντρου
Rmin |
Rmin |
||||||
Ρύζι. 9.18. Σχέδια για τον προσδιορισμό της ακτίνας του αρχικού περιγράμματος |
|||||||
μηχανισμοί έκκεντρου με βραχίονα στροφέα |
|||||||
Για να προσδιορίσουμε την ακτίνα του αρχικού περιγράμματος των μηχανισμών έκκεντρου με βραχίονα στροφέα σε μια δεδομένη γωνία ϕ 0, βρίσκουμε τις θέσεις των σημείων O 6 και O 7 στη τομή μιας ευθείας γραμμής που διασχίζεται από το σημείο Ε υπό γωνία ϕ 0 σχεδιάστηκε από
άξονες του αναλόγου της ταχύτητας d dS ϕ με εφαπτόμενες (Εικ. 9.18, β). Συνδέοντας τα σημεία Ο 6 και
O 7 με το σημείο αρχής 0, παίρνουμε τις ακτίνες R 6 και R 7 . Η ακτίνα με τη μικρότερη τιμή λαμβάνεται ως η ακτίνα του αρχικού περιγράμματος. Συγκεκριμένα, R6 > R7, δηλ. R0 = R7.
9.9. ΕΠΙΛΕΞΤΕ ΡΟΛΟ ΑΚΤΙΝΗΣ
Κατά την επιλογή της ακτίνας του κυλίνδρου, καθοδηγούνται οι ακόλουθες διατάξεις -
1. Ο κύλινδρος είναι ένα απλό εξάρτημα, του οποίου η διαδικασία κατασκευής δεν είναι περίπλοκη. Επομένως, μπορεί να εξασφαλιστεί υψηλή αντοχή επαφής στην επιφάνεια εργασίας του. Για το έκκεντρο, λόγω της πολύπλοκης διαμόρφωσης της επιφάνειας εργασίας, η διασφάλιση υψηλής αντοχής επαφής είναι πολύ δύσκολη. Για να εξασφαλιστεί επαρκής αναλογία αντοχών επαφής των επιφανειών εργασίας του έκκεντρου και του κυλίνδρου, κατά την επιλογή της ακτίνας του κυλίνδρου, λαμβάνεται υπόψη η ακόλουθη συνθήκη:
r ρολό \u003d 0,4 R 0,
όπου R 0 είναι η ακτίνα του αρχικού περιγράμματος έκκεντρου.
Η εκπλήρωση αυτής της αναλογίας παρέχει μια κατά προσέγγιση ισότητα των αντοχών επαφής των επιφανειών εργασίας του έκκεντρου και του κυλίνδρου. Ακτίνα ro-
Θεωρία μηχανισμών και μηχανών. Proc. επίδομα |

9. ΜΗΧΑΝΙΣΜΟΙ ΕΚΚΕΝΤΡΟ
9.9. Επιλογή ακτίνας κυλίνδρου
Το έκκεντρο είναι πολύ μικρότερο από την ακτίνα του αρχικού περιγράμματος έκκεντρου, επομένως, ο κύλινδρος περιστρέφεται με μεγαλύτερη γωνιακή ταχύτητα και τα σημεία της επιφάνειας εργασίας του εισέρχονται σε πολύ μεγαλύτερο αριθμό επαφών, γεγονός που οδηγεί σε ανομοιόμορφη φθορά των επιφανειών επαφής του έκκεντρου και του κυλίνδρου. Για να διασφαλιστεί η ομοιόμορφη φθορά των επιφανειών εργασίας του έκκεντρου και του κυλίνδρου, η επιφάνεια του κυλίνδρου πρέπει να έχει μεγαλύτερη αντοχή επαφής.
2. Το κατασκευαστικό προφίλ (λειτουργίας) του έκκεντρου δεν πρέπει να είναι αιχμηρό ή κομμένο (Εικ. 9.19, αλλά). Επομένως, επιβάλλεται περιορισμός στην επιλογή της ακτίνας του κυλίνδρου:
r ρολό = 0,7 ρ min,
όπου ρ min είναι η ελάχιστη ακτίνα καμπυλότητας του θεωρητικού προφίλ έκκεντρου.
Ένα μυτερό ή κομμένο προφίλ έκκεντρου (Εικ. 9.19, β) δεν θα επιτρέψει στον κύλινδρο να κυλήσει πάνω από την κορυφή του, γεγονός που οδηγεί σε ζημιά στις επιφάνειες εργασίας και των δύο συνδέσμων και σε απώλεια της απόδοσης του μηχανισμού έκκεντρου.
3. Η τιμή της ακτίνας του κυλίνδρου επιλέγεται από μια τυπική σειρά φυσικών ακεραίων στο ακόλουθο εύρος:
r ρολό \u003d (0,35 - 0,45) R 0.
Κατά την επιλογή της ακτίνας του κυλίνδρου, πρέπει να ληφθούν επιπλέον υπόψη τα ακόλουθα σημεία: η αύξηση της τιμής της ακτίνας του κυλίνδρου οδηγεί σε αύξηση των διαστάσεων και της μάζας του συνδέσμου εξόδου, γεγονός που επιδεινώνει τα δυναμικά χαρακτηριστικά του μηχανισμού έκκεντρου και μειώνει τη γωνιακή ταχύτητα του κυλίνδρου. Η μείωση της τιμής της ακτίνας του κυλίνδρου οδηγεί σε αύξηση των διαστάσεων του έκκεντρου και της μάζας του, γεγονός που προκαλεί αύξηση της γωνιακής ταχύτητας του κυλίνδρου και μείωση της χωρητικότητας φορτίου και της διάρκειας ζωής του μηχανισμού έκκεντρου.
ρmin
Ρύζι. 9.19. Σχέδιο σχηματισμού της κορυφής του εποικοδομητικού προφίλ του Cam
Θεωρία μηχανισμών και μηχανών. Proc. επίδομα |

9. ΜΗΧΑΝΙΣΜΟΙ ΕΚΚΕΝΤΡΟ
9.9. Επιλογή ακτίνας κυλίνδρου
ΣΕ Σε ορισμένες περιπτώσεις, η εισαγωγή ενός πρόσθετου συνδέσμου (ρολού) στη δομή του μηχανισμού έκκεντρου είναι αδύνατη για διάφορους λόγους. Σε αυτήν την περίπτωση, δεν υπάρχει τοπική κινητικότητα που να αντικαθιστά την τριβή ολίσθησης με τριβή κύλισης και μια πολύ μικρή επιφάνεια εργασίας με καμπύλη επιφάνεια παρέχεται στον σύνδεσμο εξόδου. Τα σημεία του καμπυλωμένου τμήματος ολισθαίνουν κατά μήκος της επιφάνειας εργασίας του έκκεντρου, δηλαδή, η φθορά της επιφάνειας του συνδέσμου εξόδου είναι πιο έντονη. Για να μειωθεί η φθορά, το τμήμα εργασίας του συνδέσμου εξόδου είναι στρογγυλεμένο. Η αύξηση της ακτίνας στρογγυλοποίησης δεν προκαλεί αύξηση των διαστάσεων και της μάζας του συνδέσμου εξόδου, ωστόσο, οδηγεί σε μείωση των διαστάσεων του δομικού προφίλ του έκκεντρου. Με βάση αυτό, η ακτίνα καμπυλότητας της επιφάνειας εργασίας του συνδέσμου εξόδου μπορεί να ληφθεί αρκετά μεγάλη σε τιμή.
9.10. ΣΥΝΘΕΣΗ ΠΡΟΦΙΛ ΕΠΙΠΕΔΩΝ ΠΕΡΙΣΤΡΟΦΙΚΗΣ ΚΙΝΗΣΗΣ έκκεντρων
Μη αξονικοί μηχανισμοί έκκεντρου με ώθηση . Δημιουργία επαγγελματία
Το cam lei εκτελείται με την ακόλουθη σειρά (Εικ. 9.20):
1. μ l .
3. Από το επιλεγμένο σημείοΠερίπου στον συντελεστή κλίμακας των μηκών σχεδιάζονται ομόκεντροι κύκλοι με ακτίνες R 0 και e.
4. Σε κύκλο με ακτίναε σύρεται μια εφαπτομένη στη διασταύρωση με
κύκλος R 0 , το σημείο τομής που προκύπτει είναι η αρχή του άξονα διαδρομής S .
7. Από κάθε σημείο διαίρεσης, οι εφαπτομένες σύρονται σε έναν κύκλο με ακτίναμι.
Θεωρία μηχανισμών και μηχανών. Proc. επίδομα |

9. ΜΗΧΑΝΙΣΜΟΙ ΕΚΚΕΝΤΡΟ
9.10.
Ρύζι. 9.20. Σύνθεση μηχανισμού απαξονικού έκκεντρου με ωστήρα
8. Από το σημείο Ο, που είναι το κέντρο ενός κύκλου με ακτίνα R 0 , σχεδιάζουμε κύκλους με ακτίνες ίσες με το άθροισμα του R 0 και την αντίστοιχη μετατόπιση του ωθητή μέχρι να τέμνεται με τις εφαπτομένες του κύκλου με ακτίνα e.
Για τη σύνθεση μηχανισμών απαξονικού έκκεντρου με ωστήρα και κύλινδρο, είναι απαραίτητο να εκτελέσετε επιπλέον τα εξής:
10. r ρολό.
Μηχανισμοί αξονικού έκκεντρου με ωστήρα . Δημιουργία επαγγελματία
Το cam lei εκτελείται με την ακόλουθη σειρά (εικ. 9.21):
1. Καθορίζεται ο συντελεστής κλίμακας μήκουςμ l .
2. Στον ελεύθερο χώρο επιλέγεται ένα αυθαίρετο σημείο O, που είναι το κέντρο του αρχικού περιγράμματος έκκεντρου.
3. Από το επιλεγμένο σημείοΠερίπου στον συντελεστή κλίμακας των μηκών, σχεδιάζεται ένας κύκλος με ακτίνα R 0.
Θεωρία μηχανισμών και μηχανών. Proc. επίδομα |

9. ΜΗΧΑΝΙΣΜΟΙ ΕΚΚΕΝΤΡΟ
9.10. Σύνθεση προφίλ επίπεδων έκκεντρων περιστροφικής κίνησης
προφίλ εργασίας
Θεωρητικό Προφίλ
Ρύζι. 9.21. Σύνθεση μηχανισμού αξονικού έκκεντρου με ωστήρα
4. Ο άξονας της διαδρομής S ευθυγραμμίζεται με τον κατακόρυφο άξονα συμμετρίας της περιφερειακής
sti με ακτίνα R 0 . Στη διασταύρωση του άξονα διαδρομής S με έναν κύκλο ακτίνας R 0, παίρνουμε το σημείο αρχής 0.
5. Από την αρχή σε κύκλο με ακτίνα R 0 στην κατεύθυνση περιστροφής των γωνιών φάσης του στρόφαλου σχεδιάζονται και στον άξονα της διαδρομής σε κλίμακα
συντελεστής μ l − μετατόπιση του ωθητή.
6. Τόξα του αρχικού περιγράμματος που αντιστοιχούν στις γωνίες φάσης αφαίρεσης
Και προσέγγιση, χωρίζουμε σε ίσα μέρη, ο αριθμός των οποίων είναι ίσος με τον αριθμό των σημείων που περιλαμβάνονται στις φάσεις αφαίρεσης και προσέγγισης. Συνδέουμε τα ληφθέντα σημεία με ένα σημείοΠερίπου, που είναι το κέντρο περιστροφής του έκκεντρου.
7. Από το σημείο Ο, που είναι το κέντρο ενός κύκλου με ακτίνα R 0 , σχεδιάζουμε κύκλους με ακτίνες ίσες με το άθροισμα του R 0 και την αντίστοιχη ανα-
μετατόπιση της ώθησης στην τομή των ευθειών που συνδέουν το σημείο Ο
Με σημεία διαίρεσης.
8. Τα ληφθέντα σημεία συνδέονται με μια ομαλή καμπύλη, σχηματίζοντας ένα θεωρητικό προφίλ έκκεντρου, το οποίο σε αυτό το στάδιο συμπίπτει με το προφίλ εργασίας.
Για τη σύνθεση μηχανισμών αξονικού έκκεντρου με ωστήρα και κύλινδρο, είναι απαραίτητο να εκτελέσετε επιπλέον τα εξής:
9. Με βάση τις δεδομένες συνθήκες, προσδιορίζεται η ακτίνα του κυλίνδρου r ρολό .
Θεωρία μηχανισμών και μηχανών. Proc. επίδομα |

9. ΜΗΧΑΝΙΣΜΟΙ ΕΚΚΕΝΤΡΟ
9.10. Σύνθεση προφίλ επίπεδων έκκεντρων περιστροφικής κίνησης
10. Από αυθαίρετα επιλεγμένα σημεία του θεωρητικού προφίλ έκκεντρου
σχεδιάζουμε κύκλους με ακτίνες r rol, προσομοιώνοντας τη θέση του κυλίνδρου ως μέρος του κυκλώματος μηχανισμού έκκεντρου.
11. Έχοντας σχεδιάσει μια καμπύλη φακέλου σε σχέση με όλες τις θέσεις του κυλίνδρου, λαμβάνουμε το προφίλ εργασίας του έκκεντρου.
Μηχανισμοί έκκεντρου με βραχίονα κουνιστή. Η κατασκευή των προφίλ έκκεντρου πραγματοποιείται με την ακόλουθη σειρά (ρύζι. 9.22):
1. Καθορίζεται ο συντελεστής κλίμακας μήκουςμ l .
2. Στον ελεύθερο χώρο επιλέγεται ένα αυθαίρετο σημείο O, που είναι το κέντρο του αρχικού περιγράμματος έκκεντρου.
3. Από το σχήμα για τον προσδιορισμό της ακτίνας του αρχικού περιγράμματος ανάλογα με
από τις δεδομένες συνθήκες μεταφέρουμε τρίγωνα 0EO 4 (Εικ. 9.18, αλλά) ή 0EO 7
(Εικ. 9.18, β).
4. Από το σημείο Ε με ακτίνα R = 0E σχεδιάζουμε τόξο που αντιστοιχεί στον άξονα
μονοπάτι Σ.
5. Από την αρχή σε κύκλο με ακτίνα R 0 στην κατεύθυνση περιστροφής των γωνιών φάσης του στρόφαλου σχεδιάζονται και στον άξονα της διαδρομής σε κλίμακα
συντελεστής μ l - μετατόπιση του βραχίονα.
6. Τόξα του αρχικού περιγράμματος που αντιστοιχούν στις γωνίες φάσης αφαίρεσης
Και προσέγγιση, χωρίζουμε σε ίσα μέρη, ο αριθμός των οποίων είναι ίσος με τον αριθμό των σημείων που περιλαμβάνονται στις φάσεις αφαίρεσης και προσέγγισης. Συνδέουμε τα ληφθέντα σημεία με ένα σημείοΠερίπου, που είναι το κέντρο περιστροφής του έκκεντρου.
7. Από το σημείο Ο, που είναι το κέντρο κύκλου με ακτίνα R 0, σχεδιάζουμε κύκλους με ακτίνες ίσες με το άθροισμα του R 0 και την αντίστοιχη μετατόπιση του ωστήρα μέχρι να τέμνονται με ευθείες γραμμές που συνδέουν το σημείο Ο με σημεία διαίρεσης.
8. Τα ληφθέντα σημεία συνδέονται με μια ομαλή καμπύλη, σχηματίζοντας ένα θεωρητικό προφίλ έκκεντρου, το οποίο σε αυτό το στάδιο συμπίπτει με το προφίλ εργασίας.
Θεωρία μηχανισμών και μηχανών. Proc. επίδομα |

9. ΜΗΧΑΝΙΣΜΟΙ ΕΚΚΕΝΤΡΟ
9.10. Σύνθεση προφίλ επίπεδων έκκεντρων περιστροφικής κίνησης
Ρύζι. 9.22. Σύνθεση εκκεντροφόρου μηχανισμού με βραχίονα
Για τη σύνθεση μηχανισμών έκκεντρου με βραχίονα και ρολό, είναι απαραίτητο να εκτελέσετε επιπλέον τα εξής:
9. Με βάση τις δεδομένες συνθήκες, προσδιορίζεται η ακτίνα του κυλίνδρου r ρολό .
10. Από αυθαίρετα επιλεγμένα σημεία του θεωρητικού προφίλ έκκεντρου
σχεδιάζουμε κύκλους με ακτίνες r rol, προσομοιώνοντας τη θέση του κυλίνδρου ως μέρος του κυκλώματος μηχανισμού έκκεντρου.
11. Έχοντας σχεδιάσει μια καμπύλη φακέλου σε σχέση με όλες τις θέσεις του κυλίνδρου, λαμβάνουμε το προφίλ εργασίας του έκκεντρου.
Θεωρία μηχανισμών και μηχανών. Proc. επίδομα |
- Σε επαφή με 0
- Google+ 0
- Εντάξει 0
- Facebook 0